С новой искусственной кожей роботы смогут отличать неодушевленные предметы от живых организмов. Это похоже на чувство осязания у человека. Чтобы понять, живое или неживое перед машиной, ей достаточно к нему прикоснуться. С помощью такой кожи «интеллектуальные» аппараты смогут проводить подводную разведку месторождений полезных ископаемых, участвовать в их добыче, очищать океан от мусора без нанесения вреда морским обитателям.
Примерно 70 процентов поверхности Земли покрыто водой — в основном океанами, которые играют важнейшую роль в регулировании глобального климата. Они служат жизненно важным поглотителем углерода: поглощают 90 процентов избыточного тепла, выделяемого в результате выбросов углекислого газа, и вырабатывают 50 процентов необходимого для нас кислорода.
Кроме того, океаны — это дом для подавляющего большинства флоры и фауны планеты; там обитают тысячи видов живых организмов. Еще в океанах хранится большое количество ценных минеральных ресурсов: запасы нефти, газа, алмазов, золота, платины.
Полезные ископаемые поверхности суши постепенно истощаются, поэтому геологи все чаще обращают свой взгляд на океанское дно. Однако до природных ресурсов Мирового океана не так просто добраться. Одна из причин — огромное давление (600 атмосфер и более), которое могут выдержать лишь редкие и дорогостоящие глубоководные аппараты.
Для освоения ресурсов океанов необходимы передовые технологии, а именно — «интеллектуальные» автономные подводные роботы, способные работать на уровне человека. Причем такие машины должны быть оснащены специальными приборами, позволяющими вести тактильное зондирование — исследовать дно с помощью «прикосновений» и таким образом определять объекты, находящиеся перед ними.
Инженеры разработали целую серию тактильных датчиков, которые применяют в распознавании объектов и текстур в различных отраслях промышленности, в робототехнике (в адаптивном захвате) и человеко-машинном интерфейсе. Но почти все они плохо работают в воде, особенно в условиях гидростатического давления.
Группа ученых из Калифорнийского университета (США) под руководством Цзюнь Чена (Jun Chen) нашла способ, позволяющий решить эту проблему. Исследователи разработали водонепроницаемую искусственную кожу для подводных роботов, благодаря которой машины смогут распознавать морские объекты по одному «прикосновению». Работа опубликована в журнале Science Advances.
В природе некоторые магнитные материалы под действием механических деформаций могут изменять свою намагниченность. Это свойство в основном наблюдалось у ферромагнитных металлов и сплавов, а само оно известно под названием «магнитоупругий эффект», или «эффект Виллари». Эксперименты показали, что на это свойство не влияет вода и оно сохраняется даже после погружения магнитного материала на несколько недель в соленую, похожую на морскую, среду.
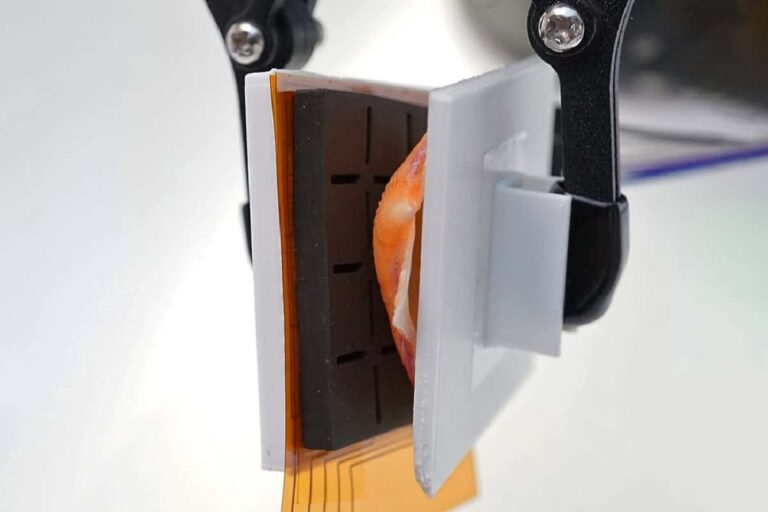
Именно на этот эффект обратили внимание Чен и его коллеги. Исследователи выяснили, что магнитоупругий эффект может проявляться и в «мягких» полимерах — веществах, которые применяют в биомедицине и робототехнике, например, для изготовления мягких мышц. Эти знания ученые использовали при разработке искусственной кожи, которая по большей части состоит из эластичного полимера и массива крошечных мощных магнитов, преобразующих любое физическое прикосновение в изменение магнитного поля, а также двух слоев из датчиков магнитной индукции, которые превращают изменения магнитного поля в электрические сигналы.
Затем Чен и его команда «натянули» кожу на роботизированную руку и испытали ее в лаборатории. Рука должна была случайным образом захватывать как «живые цели» (моллюск, морская улитка, морской гребешок, морская звезда), так и «неживые» — морской мусор (крышка от бутылки, бумажный стакан, пластиковая бутылка). Модель искусственного интеллекта, обученная расшифровывать сигналы датчиков, поступающие с кожи во время упражнений по захвату, показала 95%-ную точность в распознавании различных объектов.
По словам разработчиков, созданная ими сенсорная система на базе искусственного интеллекта не требует больших вычислительных мощностей и может дополнить зрение подводных роботов. Кроме того, с помощью такой системы автономные аппараты смогут достаточно быстро выполнять задачи в океане, в которых нужно делать захваты предметов, что сэкономит время и деньги в процессе дорогостоящих подводных миссий.
Ученые считают, что в будущем их разработку смогут использовать глубоководные роботы, проводящие разведку месторождений полезных ископаемых на океанском дне, а также аппараты, задействованные в очистке океанов или морей от мусора. Если манипулятор, на который будет «натянута» кожа, сможет различать «живое» и «мертвое», он не причинит вред обитателям подводного мира.