Международная группа инженеров разработала робота, имитирующего способности навозного жука. Механическое насекомое превзошло возможности своего прототипа, продемонстрировав недюжинную силу и ловкость. Полученные характеристики можно применить в спасательных и строительных работах.
Жуки-навозники удивительны тем, что могут, во-первых, перекатывать шарики из экскрементов животных большого размера, превышающего вес их самих. Во-вторых, эти насекомые способны к многозадачности — идти и одновременно толкать предмет, причем как по ровной земле, так и с препятствиями.
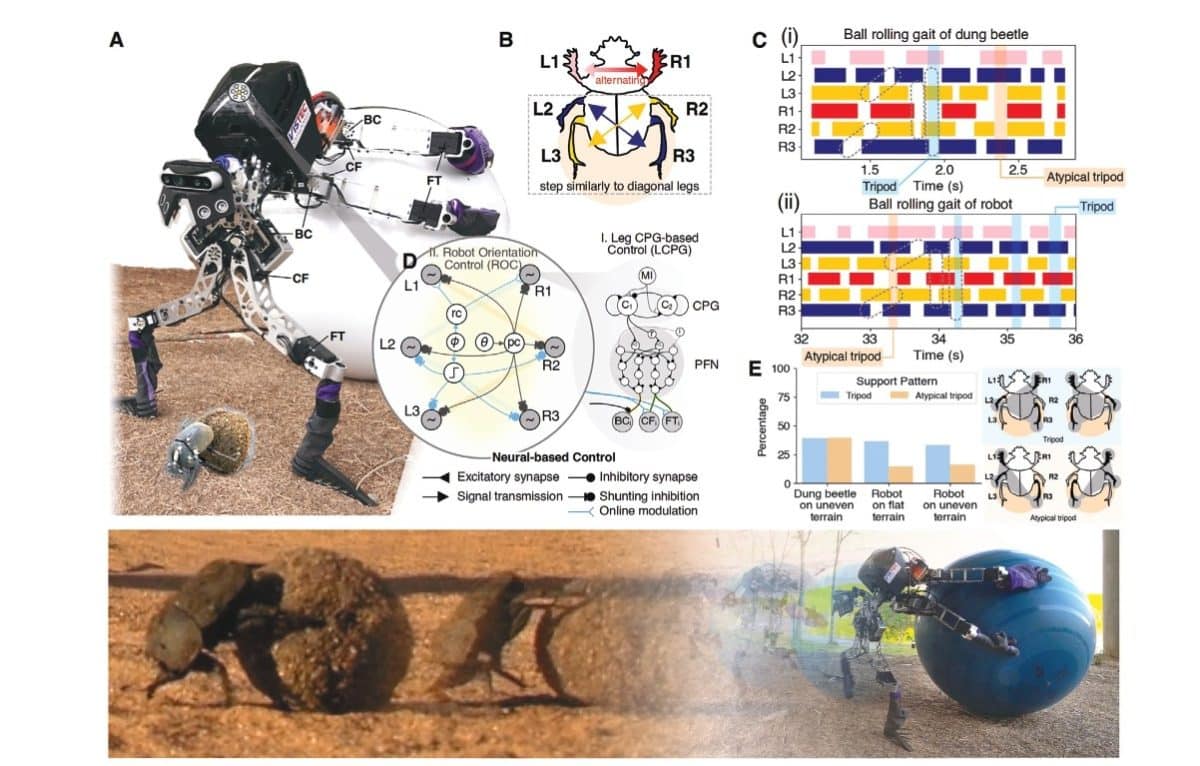
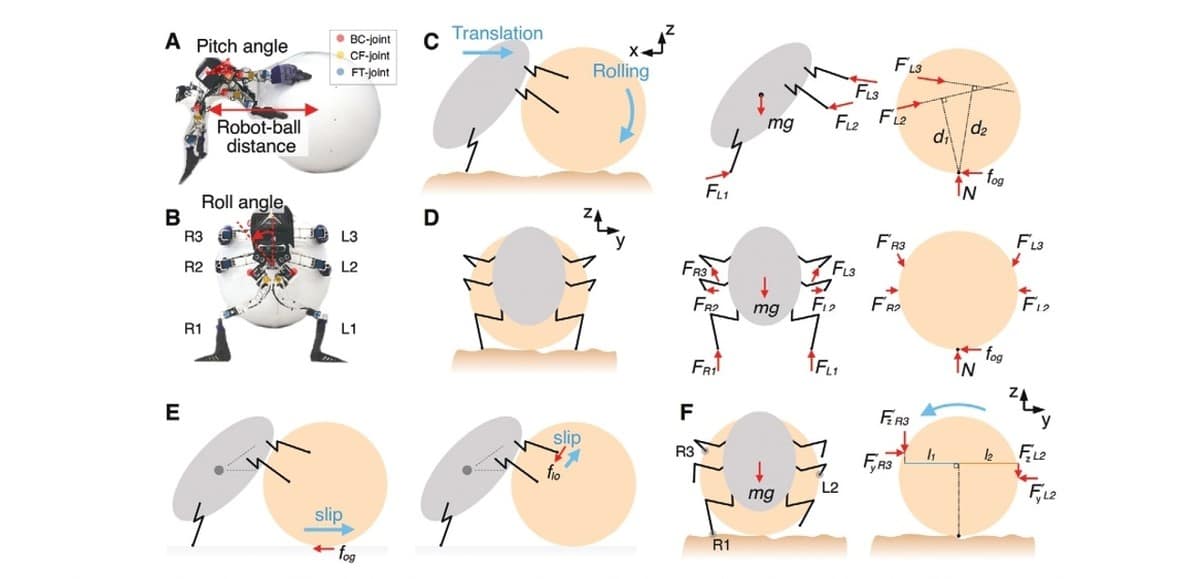
На этот раз инженеры раскрыли нейронные механизмы движения жуков, умело управляющих своими шестью лапами для передвижения и манипулирования шариками. Робототехники из Института науки и технологий Видьясиримедхи (Таиланд) и зоолог из Кильского университета имени Кристиана Альбрехта (Германия) опирались на прежние наблюдения. Из них следовало, что навозные жуки используют свои передние лапы, чтобы отталкиваться и идти задом наперед, средними и задними при этом они обхватывают шарик.
В результате ученые спроектировали шестиногого робота, получившего название ALPHA. За основу взяли природную «конфигурацию» палочника, а затем модифицировали ее. Вместо машинного обучения, которое зачастую используют в робототехнике, инженеры применили модульное нейроуправление локоманипуляторами, установленными на «конечности».

Во время эксперимента робот перекатывал два типа мячей: синий мягкий резиновый фитнес-мяч и белый жесткий стекловолоконный (шар для маркировки высоковольтных проводов линий электропередач, чтобы в них не врезались самолеты). Диаметр обоих составил 60 сантиметров (в 1,7 раза длиннее ноги робота, что почти эквивалентно пропорциям аналога из живой природы), вес — два и 4,6 килограмма соответственно (вес робота — 4,7).
Управляемый «навозник» катил мячи по ровной (пол из ламината) и неровной (твердая почва с песком) поверхностям. Успешным считалось прохождение дистанции не менее трех метров. Чтобы ноги не соскальзывали, исследователи прикрепили к ним мягкие лапки, похожие на лучи плавника у рыб, это добавило ALPHA скорости.
Таким образом, ученые добились наиболее схожей морфологии по сравнению с коллегами, прежде создававшими роботов-насекомых. Кроме того, в своем эксперименте инженеры пошли дальше, тестируя робота на неровной местности и ставя перед ним сразу несколько задач. ALPHA показал высокую эффективность по всем критериям, включая грузоподъемность, массу полезной нагрузки и скорость транспортировки объектов. Также удалось наделить робота-жука функцией, недоступной в других конструкциях, — способностью манипулировать и перемещать крупные объекты, используя небольшую площадь опоры.
Динамичность и производительность, которые продемонстрировал робот, могут найти практическое применение в разных областях, отметили авторы исследования. Например, в строительстве эту разработку можно применять для транспортировки полых пластиковых сферических шаров. Они заменяют значительную часть бетонной массы в инновационной технологии Bubble Deck, что можно перевести как «пузырьковая плита».
Еще одна область потенциального применения разработки — доставка еды и лекарств, помещенных внутрь полого шара, пострадавшим от катастроф во время поисково-спасательных операций. Еще роботов можно запускать для передачи инструментов транспортным инспекторам или для перекатывания круглых тюков сена на полях.
Научная работа опубликована в журнале Advanced Science.