
Технология 3D-биопечати имеет большой потенциал в лечении повреждений тканей и органов. Существующие подходы предполагают биопечать живой ткани in vitro перед введением ее в организм пациента. Команда из Университета Нового Южного Уэльса в Сиднее разработала гибкий роботизированный манипулятор, который может печатать 3D-биоматериалы непосредственно на органах внутри человеческого тела. Это устройство может помочь в разработке будущих усовершенствованных эндоскопических хирургических роботов.
Создание биоматериалов in vitro, с помощью настольных биопринтеров, перед введением их в организм имеет ряд недостатков. Исследователи указывают на недостаточную готовность поверхности к моменту имплантации, повреждение структуры в результате манипуляций и транспортировки, а также высокий риск загрязнения. Кроме того, хирургическое вмешательство, необходимое для введения напечатанных материалов, приводит к более длительному восстановительному периоду и более высоким затратам. Устройство для биопечати in situ позволило бы преодолеть все эти проблемы.
Именно поэтому команда доктора Тхань Нхо До разработала крошечный, гибкий 3D-биопринтер, который можно вводить в тело, как эндоскоп, для печати биоматериалов непосредственно на поверхности внутренних органов и тканей — включая кишечник, желудок или сердце. Опытный образец, названный F3DB (от flexible 3D bioprinter), состоит из печатающей головки с высокой степенью свободы, установленной на конце длинного гибкого змееподобного роботизированного манипулятора. Вся система управляется дистанционно с помощью архитектуры «ведущий-ведомый».
Устройство, пригодное для работы в самых труднодоступных местах
В настоящее время на рынке не существует устройства, способного выполнять in situ 3D-биопринтинг внутренних тканей или органов, расположенных далеко от поверхности кожи. Было представлено несколько доказательств концепции, но они оказались относительно негибкими и/или громоздкими, и поэтому не подходят для труднодоступных целей.
«Эта система обладает потенциалом для точной реконструкции трехмерных ран внутри тела, таких как повреждения в стенке желудка или повреждения и заболевания внутри толстой кишки«, — резюмирует доктор До. Благодаря гибкому корпусу, прототип способен печатать многослойные биоматериалы различных размеров и форм даже в самых узких и труднодоступных местах тела. Движения роботизированной руки — которую можно сделать любой желаемой длины — контролируются с помощью гидравлической системы.
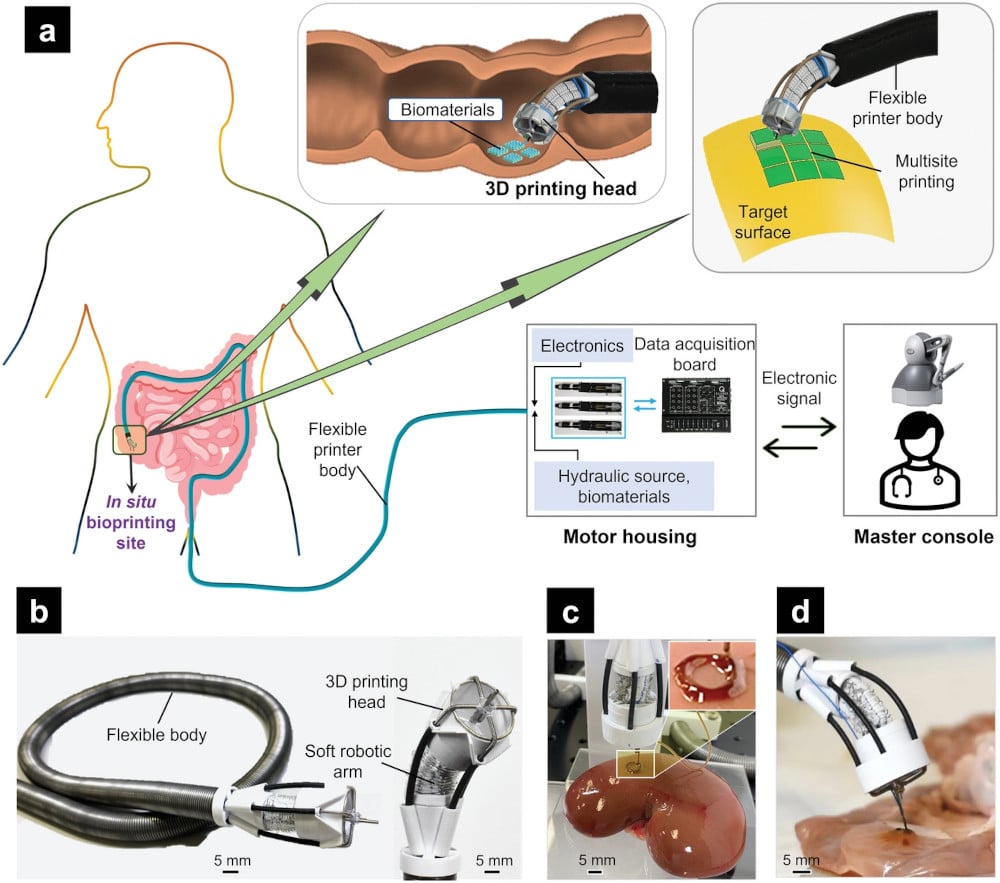
Печатающая головка сделана из гибких искусственных мышц и может двигаться в трех направлениях. Она может быть запрограммирована на печать заранее заданных форм или управляться вручную в более сложных случаях. Для облегчения процесса был интегрирован контроллер, основанный на машинном обучении.
Кроме того, F3DB позволяет осуществлять многосайтовую печать: после завершения первого задания роботизированная рука перенаправляется в другие места, где она может последовательно выполнять другие задания печати. «Благодаря этой функции область печати может быть расширена и покрыть всю поверхность органа или внутренней ткани, что невозможно при использовании существующих устройств для биопечати in vivo«, — пишут исследователи в журнале .
Подход также является минимально инвазивным: цель может быть достигнута через небольшие разрезы кожи или естественные отверстия. Самый маленький прототип, разработанный группой, имеет диаметр, аналогичный диаметру коммерческих терапевтических эндоскопов (около 11-13 мм), что достаточно невелико для введения в желудочно-кишечный тракт; исследователи утверждают, что он может быть еще меньше.
Универсальный инструмент для хирургии будущего
Таким образом, F3DB должен эффективно преодолеть несколько основных препятствий для существующих технологий 3D-биопечати: он устраняет необходимость инкубации живых материалов in vitro для созревания перед хирургической имплантацией; он позволяет избежать несоответствия интерфейсов между напечатанными биоматериалами и целевыми поверхностями; и он позволяет проводить минимально инвазивную процедуру. Команда считает, что при дальнейшем развитии, в течение пяти-семи лет, технология может быть использована медицинскими работниками.
Исследователи протестировали свое устройство внутри искусственной толстой кишки, а также 3D-печать различных по форме материалов на поверхности свиной почки. Эксперименты показали, что клетки не были затронуты процессом, и большинство из них остались живыми после печати. Они продолжали нормально расти: через неделю после печати их количество увеличилось в четыре раза.
Команда также продемонстрировала способность F3DB проводить эндоскопические операции со свежей свиной тканью. Устройство показало перспективность для будущей разработки универсального хирургического инструмента, который позволит избежать необходимости использования нескольких инструментов, тем самым снизив риск инфекции и продолжительность процедуры.
В частности, сопло печатающей головки можно использовать в качестве своеобразного электрического скальпеля для маркировки и последующего вырезания раковых образований; затем через сопло можно направлять воду для очистки тканей, а немедленная 3D-печать биоматериала будет способствовать более быстрому заживлению.
Получив предварительный патент, исследователи теперь планируют провести испытания на живых животных, чтобы продемонстрировать его практическое применение. Они также планируют включить дополнительные функции, такие как камера и система сканирования в реальном времени, которые позволят реконструировать 3D-томографию движущихся тканей внутри тела.