
Учёные создали роботизированную руку, способную изменять форму и характеристики по требованию. Она выдерживает значительные нагрузки (до тысячи раз превосходящий вес самой руки), при этом оставаясь мягкой и прочной одновременно. Такое достижение основано на использовании полимера с памятью формы и магнитных частиц.
Ученые изучают новые способы использования робототехники. В последнее время особую популярность приобрела мягкая робототехника. Эта дисциплина, вдохновленная природой, стремится к созданию роботов из гибких материалов, способных повторять адаптивность живых существ. Такая гибкость уменьшает риск повреждений, особенно в сложных условиях местности, а также открывает возможности для применения в биомедицине.
Несмотря на перспективность мягкой робототехники, её развитие сталкивается с рядом проблем, в том числе с выбором материалов. Силикон, традиционно используемый в этой области, имеет механические ограничения, например, низкую несущую способность. Исследователи рассматривают различные пути преодоления этих преград, в частности, применение пневматических систем для регулировки жесткости по мере необходимости. Такие решения часто обладают ограниченным диапазоном жесткости, что снижает их адаптивность к различным условиям.
В недавнем исследовании, опубликованном в журнале Ученые из Ульсанского национального университета науки и технологии в Южной Корее создали гибкий магнитный материал, использованный для разработки роботизированной руки. Технология обладает широким диапазоном жесткости и высокой несущей способностью.
Регулируемая жесткость и беспрецедентная прочность
Роботизированная рука изготовлена из двух основных материалов: полимера с памятью формы и магнитных частиц. Система способна переходить из мягкого в жесткое состояние, при этом жесткость между этими состояниями увеличивается более чем в 2700 раз. Модуль Юнга изменяется от 110 килопаскалей до 297 мегапаскалей под воздействием изменения температуры.
Руку можно запрограммировать для работы с объектами, а управлять ею будет магнитное поле. Это делает магнитные частицы необходимыми. Материал обладает высоким соотношением полезной нагрузки к весу.
При растяжении материал способен выдержать нагрузку в тысячу раз превышающую его собственный вес, а при сжатии это соотношение увеличивается до 3690. Система позволяет выполнять различные управляемые движения: растяжение, сжатие, сгибание и скручивание. Длина материала может удлиняться до 800 % от первоначальной.
Работа с тепловой модуляцией
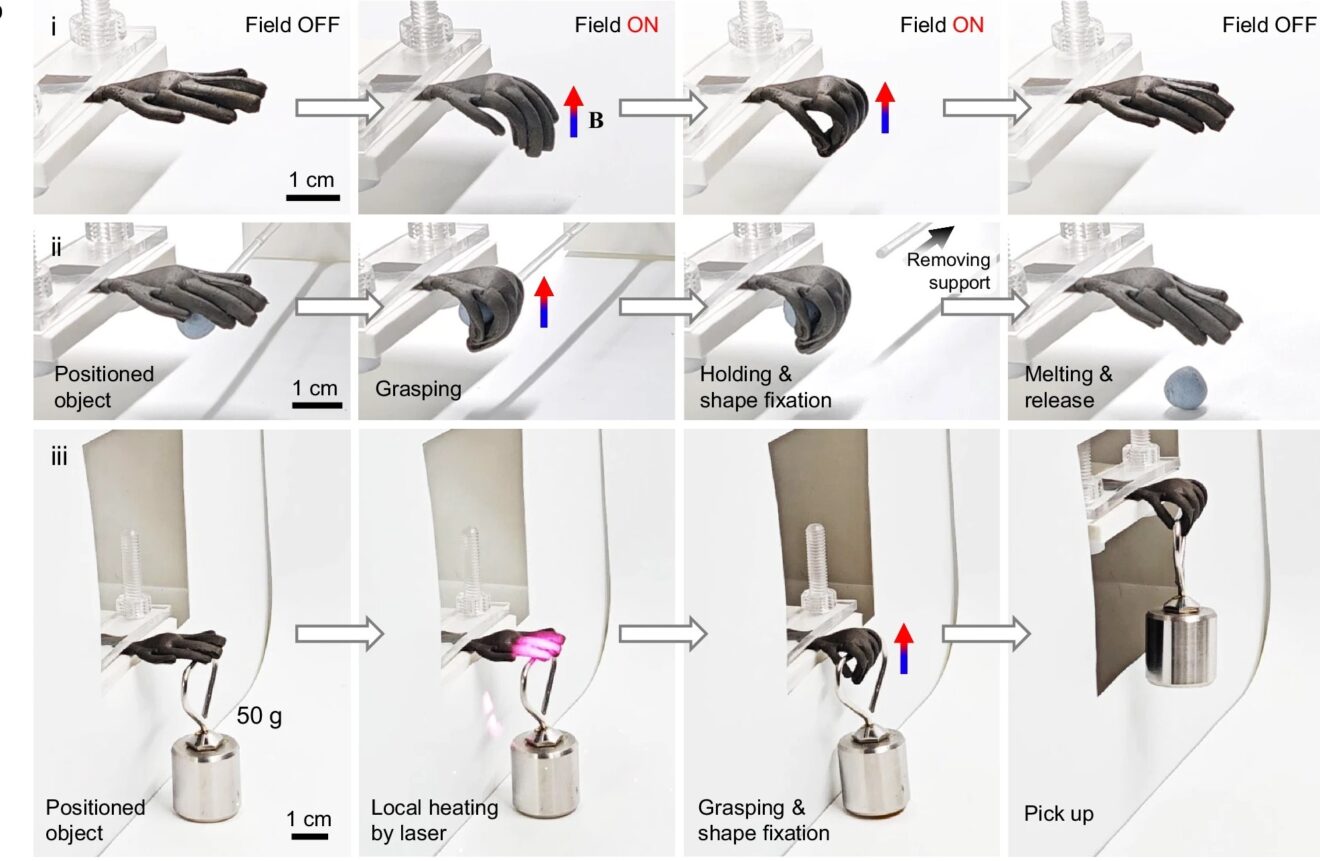
Под действием тепла робот размягчается и изменяет форму по заданию: растягивается, сжимается или сворачивается. Магнитное поле управляет его движениями точно. Для фиксации деформированного состояния систему охлаждают до комнатной температуры. Возврат к исходному виду осуществляется нагревом без магнитного поля, материал возвращается в «запертое» состояние благодаря свойству памяти формы.