RadarSFEMOS позволяет определять местоположение и движение объектов с высокой точностью даже при дожде, снеге и тумане. Автономные машины пока испытывают трудности с вождением в таких условиях, поэтому массовое применение этих машин без решения этой проблемы проблематично. Новую технологию планируют постепенно внедрять на российских грузовиках и такси.

Создатели новой научной работы стремятся решить эту проблему.
В настоящее время существует два подхода к созданию беспилотных автомобилей: Tesla и все остальные. Первый основан на вождении по данным камер; нейросеть для этого обучается на действиях обычных водителей, которые, как известно, видят дорогу только в видимом диапазоне. Альтернативный подход использует дополнительные сенсорные системы, чаще всего лидары, предоставляющие подробную 3D-картину дорожной обстановки.
Это решение весьма проблематично. Причина кроется не только в высокой стоимости наборов лидаров, сравнимой с ценой бюджетных автомобилей, но и в их недостатках. Например, в тумане и снегу видимость для них падает до нуля. Человек в таких условиях может что-то разглядеть на дороге, а беспилотное авто с лидаром встанет. Другая сложность: поскольку люди-водители лишены лидаров, обучение нейросетей использованию лидарных данных затруднено. Выборки малы, отчего часты галлюцинации. Так называют ситуации, когда нейросеть видит на дороге то, чего там нет, и предпринимает, например, фантомное торможение — тормозит на пустой дороге, рискуя тем, что в машину под ее управлением въедут сзади.
Некоторые научные группы считают радары более разумным вариантом. В отличие от лидаров, излучение радара создает изображение и в плохую погоду, водяные капли относительно слабо поглощают радиоволны. Однако, так как длина их волн больше, чем у лидарного излучения, данные имеют меньшее разрешение, более редкие. Кроме того, сигналы радаров в реальных дорожных условиях сталкиваются со множеством шумов, артефактов и отсутствием радиозаметной разметки на дороге. Без нее сложно обучить нейросети, способные управлять машиной, опираясь на радар. Программное обеспечение для таких систем намного сложнее в разработке, чем сама аппаратура.
В связи с этим специалисты Московского физико-технического института создали новую обучающуюся систему для работы с данными 4D-радаров — RadarSFEMOS. Об этом опубликована статья. опубликовали в журнале IEEE Robotics and Automation LettersСистема превосходит предшественников по эффективности шумоподавления и способности определять направление и скорость перемещения объектов в окружении. Важно отметить, что радиолокационные системы обычно труднее обнаруживают движущиеся объекты, чем ближе их скорость к скорости машины, на которой установлен радар. Определение направления осуществляется без дополнительной разметки.
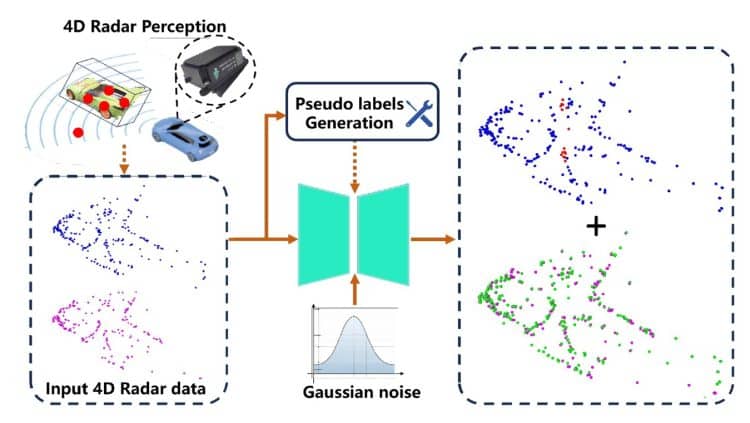
RadarSFEMOS использовала диффузионную модель шумоподавления для очистки радарных данных от шумов за миллисекунды. Для идентификации окружающих предметов система применяет трансформерный анализатор с адаптивной архитектурой, что позволяет различать объекты при всего 5-10 точках отражения радарных волн на квадратный метр проекции объектов. Лидары для этого требуют как минимум сотни точек на квадратный метр.
Алгоритмы RadarSFEMOS учитывают скорость автомобиля-носителя и вычитают ее из скоростей окружающих объектов. 4D-радар способен измерять скорость движения объектов к автомобилю и от него. Благодаря ИИ система обучается без ручной разметки массива данных, постепенно различая радарные шумы от реального движения и повышая точность работы.
Система определяет движение объектов возле автомобиля и разделяет их на движущиеся и статичные независимо от погодных условий. Это подобно шестому чувству у беспилотника. Алгоритм готов к использованию на серийных радарах, которые в 50 раз дешевле лидаров, — сказал Степан Андреев, директор Научно-технического центра телекоммуникаций МФТИ.
Для оценки способности RadarSFEMOS предотвращать фантомные торможения и реакции на несуществующие объекты системы испытали на стандартных наборах данных View-of-Delft (VoD) и TJ4DRadSet. Количество таких срабатываний сократилось в несколько раз, а точность определения местоположения объектов возросла до 89%.