Учёные из Калифорнийского технологического университета создали для подводного дрона движитель, копирующий движения хвостового плавника тунца.
Инженеры-робототехники указали на большой прикладной потенциал таких аппаратов: их всё чаще будут использовать в научных целях, военных операциях и обслуживании промышленной инфраструктуры. Для этого беспилотникам нужно уметь преодолевать большие расстояния, сохраняя возможность точного маневрирования или удержания на месте.
К дронам, проверяющим подводные нефтяные трубопроводы, предъявляются такие требования: достижение удаленных установок, точное позиционирование и маневрирование при ремонте. Но по характеристикам современные мини-«наутилусы» пока значительно уступают летательным беспилотникам, хотя стоят дешевле в строительстве и эксплуатации.
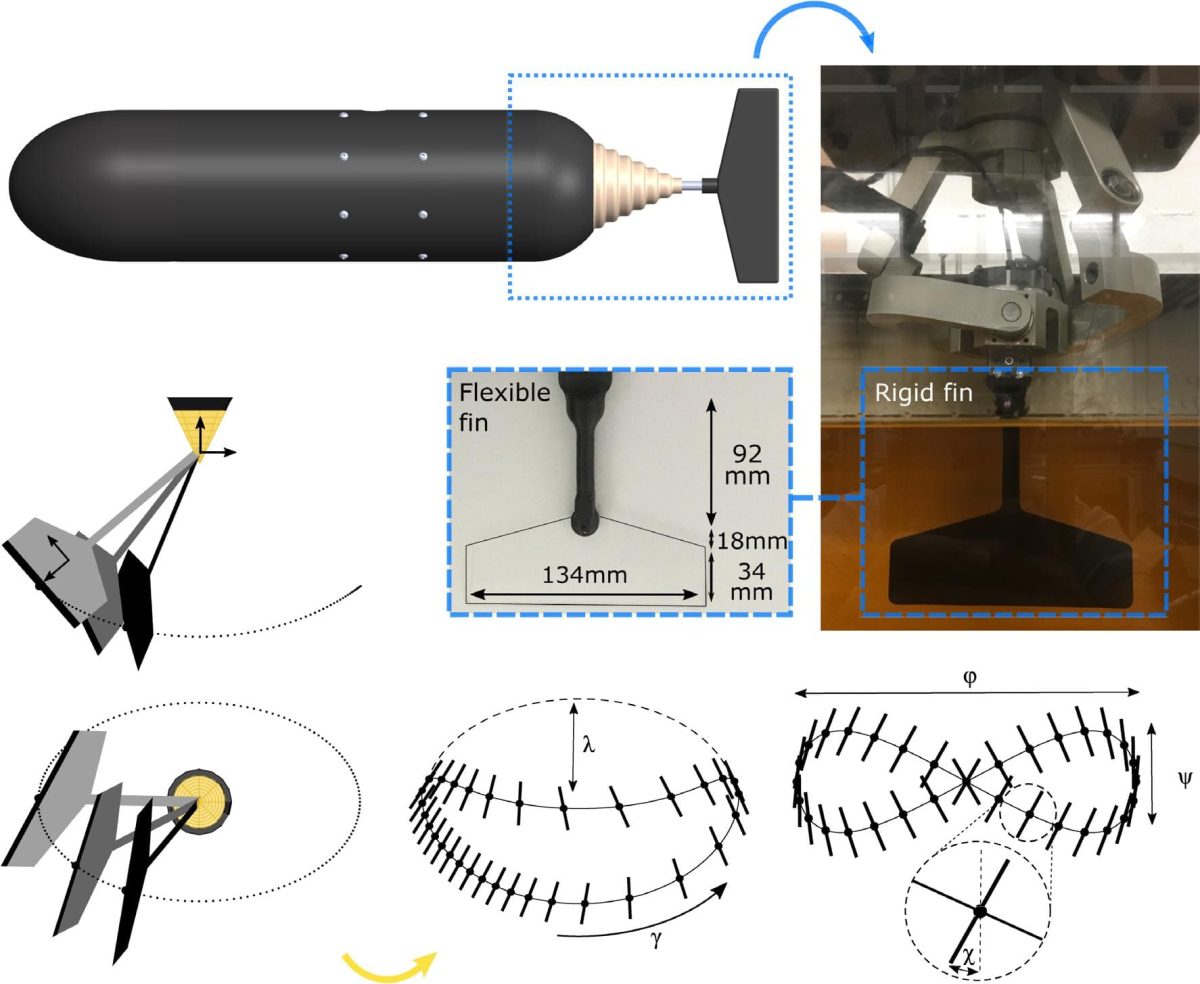
Разработчики прототипа роботизированного плавника использовали как биологические особенности рыб, так и механизмы, созданные человеком. Гибридный гребной движитель копирует трехмерную кинематику хвостового плавника тунцов. Этот орган выполняет функции движителя, стабилизатора и руля, давая рыбе курсовую устойчивость и маневренность.
Предлагаемый плавник-пропеллер с тремя осями устанавливается в задней части транспортного средства. Движение плавника создается сферическим манипулятором, совершающим движения по траектории восьмерки или эллипса, имитируя подметающие и вращательные движения гребков рыб, влияющих на скорость и маневренность. Эксперименты показали, что трехмерная кинематика повышает маневренность на 49% по сравнению с двумерной, ограничивающейся прямолинейными маховыми движениями. Механизм эффективен для широкого спектра геометрий и жесткости плавника.
Новый прототип отличается от существующих аппаратов способностью выполнять две задачи: дальние миссии и удержание с маневрированием на месте. До этого подводные беспилотники специализировались на одной из этих задач. Предлагаемый механизм выполняет их последовательно, а не одновременно.
Исследователи стремятся улучшить устройство, сделав «плавник» более аэродинамичным и звуконепроницаемым, после чего проведут его испытания. С помощью плавных, быстрых и бесшумных движений робот, оснащенный таким устройством, сможет эффективнее изучать глубины океана.
Научная работа опубликована в журнале Scientific Reports.