Как сбить цель в космосе? Ответы будут разными, даже для специалистов разных областей. Каждый видит свои стороны дела. Можем ли мы, например, рассмотреть перехват в космосе глазами специалиста по динамике полета и управлению движением? Это своеобразный конструктор и разработчик полета, зодчий движения и полетных ситуаций. По его полетной схеме работают конструкторы металла, создающие аппарат, и стартовые команды. Средство космического перехвата тоже будет лететь по его решениям.

В данном случае мы могли бы рассмотреть задачу с позиции динамики полета и управления, что представляется весьма заманчивым подходом. С некоторыми упрощениями, возможно, достичь этого с приемлемыми результатами.
Разработчик видит техническую систему иначе, чем остальные. Для него это клубок смыслов, реализованный в конструкции. Именно так он воспринимает задачи и ищет решения. Его знания из специальных областей, часто недоступных широкой публике, также играют важную роль.
Заатмосферное пространство: пределы высоты и скорости. Какими целями будет обусловлена деятельность в нем?
Граница атмосферы установлена на высоте 100 километров, а выше – космос. Все объекты, движущиеся там, подчиняются законам баллистики с небольшим воздействием аэродинамических сил. Характеристики их движения распределяются по высотам и скоростям. Низкоорбитальные спутники и боеголовки межконтинентальных ракет на предельных дальностях составляют сегмент целей по высоте и скорости: их скорость находится в диапазоне 6,0-7,5 километра в секунду.
Ракеты средней дальности, оперативно-тактические ракеты, а также реактивные системы залпового огня с дальностью 200 километров и более составляют нижний сегмент. Реактивные снаряды этих систем тоже могут подниматься выше 100 километров. В потоке, взлетающем еще выше, включая МБР, летящие уже выше 100 километров, и их боевые ступени разведения с боеголовками, важен тот факт, что скорости (которые быстро растут) различны. Сразу за атмосферой эти цели ещё не разогнались сильно и не ушли высоко, поэтому их можно отнести к нижнему сегменту.
В его состав входят элементы оружия — боеголовки и ракеты различного класса. С каждым годом разрастается быстрее верхнего, поскольку более прост в изготовлении и осваивается первыми при распространении ракетных технологий в новые страны. Для выбора типовых целей это может быть ориентиром.
Так определяется скорость и высота типовой цели космического перехвата. Высота ее — первые сотни-тысяча километров, удаление (расстояние до цели по прямой) в пару раз больше, а скорости два-пять километров в секунду. Атмосфера уже не оказывает на нее ощутимого действия: слишком высоко. Цели могут маневрировать в пустоте и быть групповыми.
С усовершенствованием техники баллистическая цель сможет активно уклоняться от ракеты-перехватчика, изменять траекторию в соответствии с её действиями. Получится своего рода гибрид боеголовки и противоракеты, которая вступит в дуэль, но не для сбивания другой ракеты, как обычная противоракета, а для избежания перехвата. Такое маневрирование возможно как в акробатике воздушного боя, так и в погоне. Но пока такие системы остаются будущим. На сегодняшний день маневр баллистической цели реализуют путём включения нескольких раз блока боковых твердотопливных двигателей маневрирования.
Перехват — это принудительное прекращение полета цели прежним путем: уничтожение или изменение курса. Цель в космосе может быть ликвидирована различными физическими методами. Например, лазером, хотя пока таких боевых систем не существует. Можно сделать ядерный заряд ненадежным, облучив его плотным нейтронным потоком плутония. Это критически усилит начальный уровень реакций в плутонии и вместо взрыва даст преждевременный «хлопок»; но это теоретически (будет ли это перехватом, если траектория цели при «протухшем» заряде не изменится?).
Действительный способ уничтожения, эффективный уже сейчас, заключается в механическом ударе. Быстрота и точность доставки такого удара возможны лишь благодаря ракете. Основой действий вблизи Земли является именно ракетный перехват.
Чем бить по цели, когда подлетели
В космосе и атмосфере волна взрыва фугаса непригодна для перехвата. В космосе она ослабнет из-за разлета газа, а в атмосфере распространится по неподвижному воздуху, быстро рассеиваясь. Сверхзвуковая цель может просто улететь от нее. В таких условиях действенен кинетический удар материального тела.
Осколочное поражение — обычный случай перехвата. Конус или поток осколков попадает в цель и разрушает ее, критически нарушая работу. Готовые элементы поражения позволяют сформировать осколочное поле точнее и эффективнее. Управляемые осколочные поля — очень эффективная, интересная и изученная тема, но о ней позже.
Продолжение боевой части, стержневая часть, несильным взрывом раскрывает сетку из стальных стержней и «рубит» ею цель с налета. Кинетическая боевая часть продолжает ту же логику — прямое попадание в цель без сетки стержней, только корпусом. Так таран пришел из авиации в космос, оставаясь действенным и современным способом поражения уже на ракетно-космическом уровне. Выполняется по принципу «сбить пулю пулей» автономным малогабаритным самонаводящимся таранным средством. У него есть плюсы, делающие такой выбор эффективным решением.
Перехватчик может быть небольших размеров и весом, для поражения достаточно килограмма. Удар навстречу со скоростью пять-восемь километров в секунду не нуждается во взрывчатке, так как воздействие на цель будет более мощным. Не требуется боевая часть, система подрыва, звено выработки команды на подрыв, аккумулятор. Не нужно определять и момент подрыва. Вся бортовая начинка сводится к одному: совмещению траектории с целью до финальной встречи. Это называется наведением.
Наведение через нужное поведение
Существует множество способов наведения.
Некоторые методы основаны на самонаведении, другие — на командном управлении. Возможна работа автономной инерциальной системы, с астрокоррекцией (по звездам) или коррекцией по GPS – всё это может быть реализовано на борту нашего аппарата.
Система наведения, которая входит в состав системы управления полетом, осуществляет процесс наведения. Как и любая другая техническая система, она функционирует с погрешностью. Текущая ошибка навигации для кинетического перехватчика должна быть меньше размера цели, то есть меньше метра.
Изменение направления движения происходит за счёт воздействия на траекторию. Это воздействие может быть непрерывным или осуществляться импульсами с определённой частотой и количеством в сериях. Сила воздействия может быть как большой, так и малой. Она изгибает траекторию путём приложения тяги реактивных двигателей маневрирования. Для достижения эффективного изгиба важна боковая перегрузка, создаваемая тягой, которая определяет параметры поворота: направление, радиус и время.
Динамика полета-1
Перегрузка — это ускорение, измеряемое в g, средне земному ускорению силы тяжести. В технике её используют из-за удобства понимания. В ракетостроении часто применяют перегрузку для описания усилий, которые воздействуют на конструкции. Например, бак массой тонну при пятикратной перегрузке весит пять тонн. Конструкция должна выдерживать такой вес.
Трамвай на повороте направляется рельсами, изначально изогнутыми, которые давят на него и создают боковую перегрузку, заставляющую его уходить в сторону. В ракете наоборот: боковая перегрузка, созданная на борту, сгибает траекторию в поворот. С увеличением перегрузки радиус и время поворота уменьшаются. Траектория ракеты поворачивается под воздействием боковой перегрузки, действующей на борту.
Ракеты для работы в атмосфере (зенитные, «воздух — воздух» и другие) из-за маневренности создают большие боковые перегрузки до 40—90 g. Их корпус отклоняют мощные силы давления сжатого воздушного потока (ракета ставится под углом атаки). В космосе нет наружных давлений, как ни крути корпус; и перегрузки нужны не меньшие. Там работают только реактивные двигатели маневрирования. Несколько сопел с разных сторон аппарата создают боковую силу тяги.
Возможны и группы двигателей разной мощности: мощные поворачивают сильнее и быстрее, слабые точнее.
Перегрузка обусловлена не только силой двигателей. Снижение массы аппарата увеличит перегрузку при той же тяге, поскольку перегрузка представляет собой ускорение, определяемое отношением тяги двигателя к массе аппарата.
Большая перегрузка обеспечивает более быстрые и крутые повороты; малая масса повышает маневренность. По этой причине возникла концепция отдельного от ракеты легкого, компактного и маневренного кинетического перехватчика, действующего на конечном участке полета до цели за атмосферой. Ракета поднимает его в космос и разгоняет прямо к цели, после чего отделяется. Дальнейший полет — самостоятельная работа перехватчика в высокоточных движениях, для успешного выполнения которых ему потребуются особые характеристики.
Где цель? Найди ее точней
Для определения цели необходима информация о её местоположении и траектории движения. Видеть цель можно в радио-, оптическом, ультрафиолетовом или инфракрасном канале. Оптический канал слабым образом функционирует в тенистой зоне Земли (в темноте). В радиолокационном канале действует правило: более мощное излучение — точнее изображение. Мощность радиолуча определяет и дальность обнаружения цели. Но увеличение мощности передатчика ведёт к росту массы передатчика и элементов питания, что снижает боковую перегрузку и маневренность перехватчика.
Излучающую мощность и массу можно разместить на верхней ступени ракеты. За атмосферой эта ступень летит в свободном полете, так же как и перехватчик, одинаково тормозясь в равном для обоих местном гравитационном поле. По этой причине ступень ракеты движется где-то рядом с перехватчиком. Можно установить на ней радар подсветки цели, а отраженный сигнал будет принимать перехватчик. Приемник займет минимальную массу по сравнению с излучателем и его питанием. Но это потребует долгой, до перехвата, ориентации ступени ракеты на цель. Проще облучать цель с намного более мощного наземного или корабельного радара.
Инфракрасный канал достаточно надежен. Задача теплового наблюдения отдельных тусклых целей в космосе не всегда простая, но решаема. Факелы разгонных ступеней МБР достаточно ярки в этом диапазоне. Двигатели же боевой ступени разведения могут работать на сжатой углекислоте или азоте, не давая огня, тепловой яркости и видимости. Но корпус ступени еще не успеет остыть после старта, и будет неплохо светиться на своей температуре в инфракрасном диапазоне. А тепловой сенсор можно охладить жидким азотом для повышения качества зрения. Инфракрасные головки самонаведения компактны, легки, точны и чувствительны;
подходят на роль «глаза» ракеты-перехватчика.
Фильтр Калмана: математика космических полётов
Процесс сближения и управления движением перехватчика строится на данных о его положениях и скоростях, а также о положении и скорости цели. Алгоритмы анализа данных и выработки управляющих команд применяют специальную математику. Например, фильтр Калмана — система дифференциальных уравнений для расчета апостериорной плотности вероятности и набора значений математических ожиданий. В итоге работы фильтра можно получать оптимальную и непрерывно обновляемую оценку положения и вектора скорости цели в условиях плохого ее наблюдения: нечеткого, с помехами, или отрывкового.
Помехи присутствуют во всех каналах наблюдения, вне зависимости от типа, так как Вселенная не пуста. В поле зрения всегда будет что-то кроме цели, видимое в данном канале. В оптическом, тепловом, радиолокационном, акустическом, сейсмическом, гравиметрическом — везде. Мир виден в любом канале наблюдения, и цель воспринимается как часть фона всего наблюдаемого. Зашумлено, затуманено, засвечено, зацвечено, затенено, размыто, приглушенно: помехи проявляются повсеместно и обладают бесконечным разнообразием.
Точные координаты могут быть искажены сильным блеском самой цели: чистый фон и отсутствие других наблюдаемых объектов могут сделать цель казаться более яркой. В этом случае размытость цели своим большим блеском компенсирует отсутствие помех чистого фона. Сам «глаз» также создаст помехи, независимо от его конструкции. Помех станет больше при неточном функционировании «глаза». Фильтрация Калмана может помочь уточнить положение цели при учете всех этих сложностей.
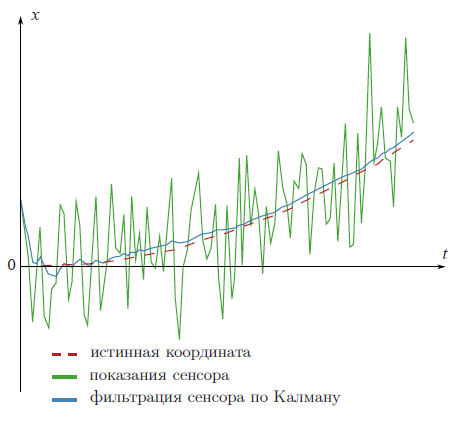
Этот фильтр может учитывать не только нынешнее местоположение и скорость объекта, но и его самые точные прогнозы для последующих моментов времени. Благодаря этому фильтр способен предсказать наиболее вероятную траекторию цели с наименьшим количеством ошибок.
Прогнозы постоянно совершенствуются двухуровневым алгоритмом фильтрации на основе текущих наблюдений (экстраполяция — уточнение). Фильтр Калмана является лишь одним примером; его можно дополнить линейно-квадратичным регулятором (работающим совместно с фильтром Калмана) и другими.
Все это не разработки XIX века. Рудольф Калман предложил и применил свой фильтр в компьютерной системе навигации пилотируемых «Аполлонов». Википедия уточняет: «Фильтры Калмана оказались критически важными для реализации навигационных систем подводных лодок ВМС США с ядерными баллистическими ракетами, в навигационных системах крылатых ракет, например, «Томагавков». Также его использовали в навигационных и управляющих системах проекта NASA «Спейс шаттл», используется в системах управления и навигации МКС».
Разделы и главы высшей математики с особым содержанием очень интересны, особенно активно развивающиеся. Часть такой математики не издаётся открыто, а другая часть засекречена.
В специализированных учреждениях подобные разделы математики называют спецглавами и спецразделами высшей математики. Такая математика может применяться и на перехватчике.
Непростая УТС путь проложит до небес
В дополнение к специальной математике существует значительная и богатая теория, называемая «управление в технических системах», или УТС. Эта теория рассматривает техническую систему как совокупность взаимосвязанных элементов, включающую объект управления. Главная концепция УТС — реакция элемента на сигнал или команду изменением величины на единицу.
Под воздействием резкого скачка в одну единицу звено реагирует — через определённое время (время реакции) переходит в новое состояние. Переход может существенно различаться для разных звеньев: у одних — долгим плавным ростом до уровня устойчивого состояния, у других — быстрым резким всплеском, словно волна, которая поднимается высоким горбом и затем плавно снижается до нового уровня.
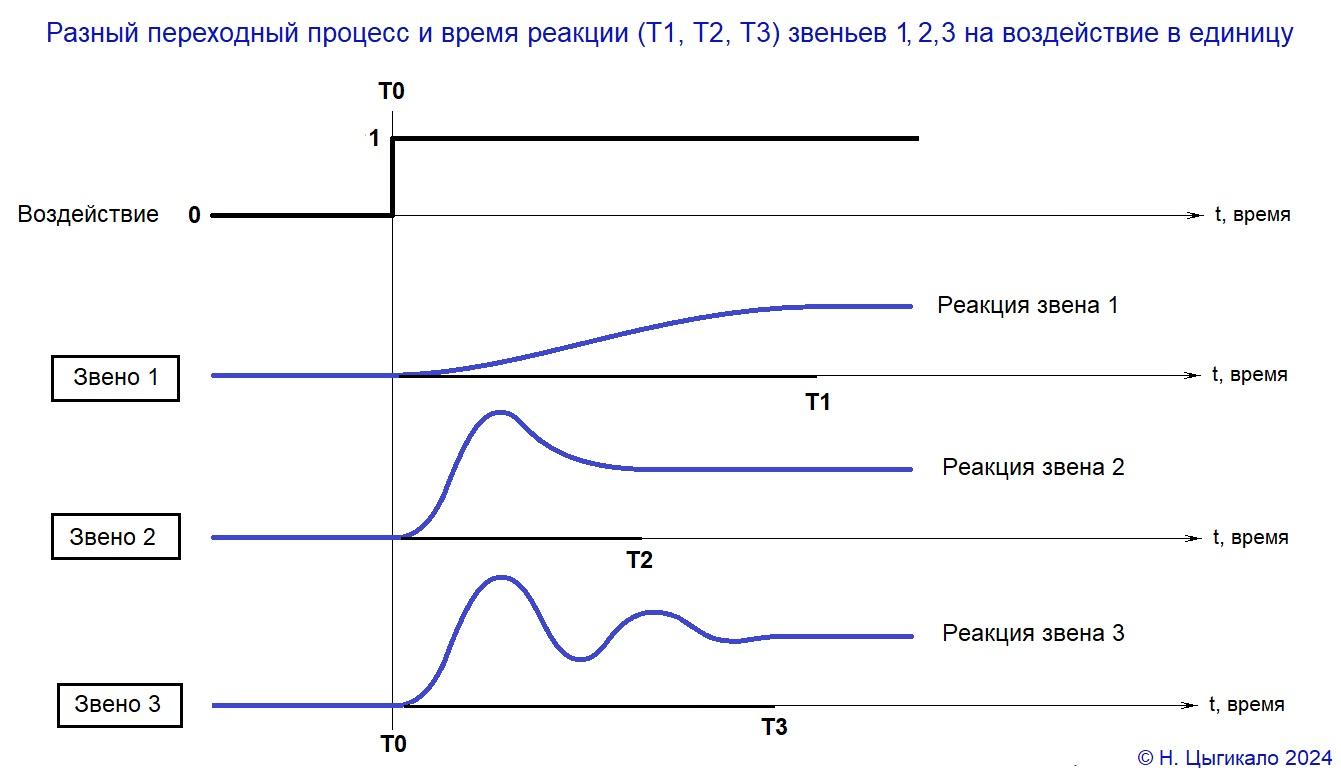
Каждый из звеньев пройдёт через своё переходное состояние, длительность которого может отличаться у каждого: для одного это медленный рост до установленного состояния, для другого – сразу превышение этого значения.
Возможны колебания на пути к установившемуся состоянию, как затухающие, так и незатухающие. Свойства звена и его поведение после воздействия входящей единицы могут быть самыми различными. Давая команды несколькими единицами, получим реакцию звена на управляющую команду в широком рабочем диапазоне.
Несколько последовательно или параллельно соединенных элементов формируют реакцию последнего элемента, обычно объекта управления. Его величина и характер нарастания реакции — то есть поведение объекта управления — определяются математическими правилами и формулами, описывающими закономерности в этой области.
Можно добавить обратную связь от любого элемента цепочки на любой предыдущий, сделав ее отрицательной или положительной. Это зацикливание усложнит реакцию (и изменит время) объекта управления на воздействие на звенья системы. Обратных связей от разных элементов цепочки к разным предшествующим может быть несколько, или много, до густых дебрей. Как и несколько «входов» в разных местах.
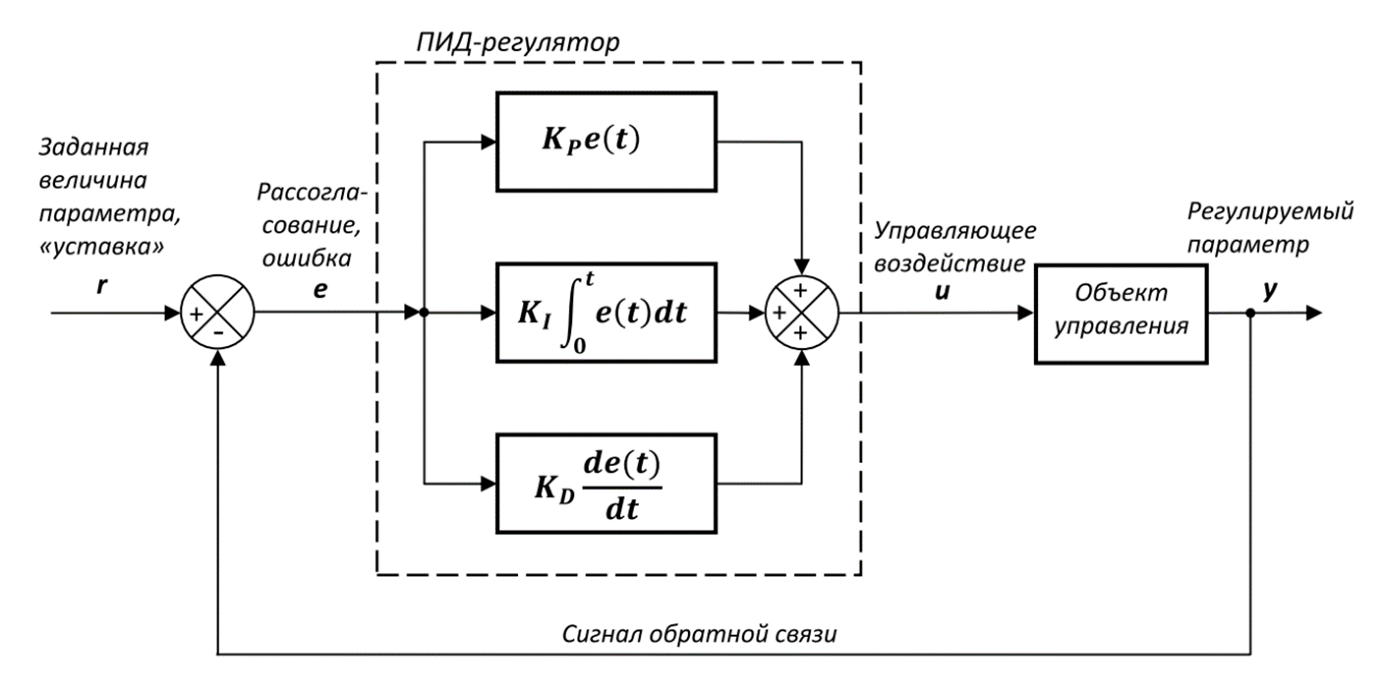
Система с регулятором типа ПИД включает три звена: пропорциональное, интегральное и дифференциальное. Каждое звено представлено формулой, определяющей его поведение. Система управляет объектом и использует отрицательную обратную связь.
Такую систему звеньев можно назвать звеном со своими сложными свойствами. Его реакция на воздействие задается правилами и формулами, поэтому она закономерна и точно поддаётся расчёту. Поведение звена может иметь новые характеристики — например, быть устойчивым или неустойчивым; до определённого уровня воздействия устойчивым, а выше этого уровня неустойчивым. Неустойчивость означает отсутствие установившихся конечных состояний, реакция звена «идет вразнос» в той или иной форме. В результате не удаётся достигнуть необходимого установившегося состояния системы в нужное время: управление неэффективно. Переход от устойчивости к неустойчивости определяется специальными критериями Ляпунова, Гурвица, Рауса, Михайлова, Найквиста и другими.

Пример более сложной системы управления по тангажу: больше звеньев, три входа (слева выделены синим цветом), две обратных связи (отмечены красными кружками). В каждом звене записан его закон поведения или функция. Формула в верхней части схемы выражает закон поведения объекта управления, самого правого звена (выделено зелёным цветом). Это РМВ, рулевая машина высоты, привод, задающий положение аэродинамической поверхности или угол поворота сопла, управляющих задиранием носа летательного аппарата выше или ниже горизонта. Эта конкретная система установлена на канале управления по тангажу транспортного самолёта Ил-76.
Количество звеньев может достигать десятков или тысяч, а характеристики и поведение системы из них — чрезвычайно сложными, хотя расчетными и известными. Перед последним звеном формируется управляющее воздействие на объект управления, приводящее его в заранее рассчитанное нужное состояние. Последнее также входит в систему, связанный с ней всегда как входящим, так и обратным каналом связи. Объект управления воздействует на систему и присутствует в ней, влияя на ее динамику. Системе нужны данные от объекта управления для определения его состояния и корректного действия. Без обратной связи управление станет невозможным.
Результат управления перехватчиком — его текущая ориентация, скорость (размер и направление), траектория, местоположение по отношению к цели, параметры её подлёта и так далее.
Останемся при этом у УТС, хоть многие важные моменты остались без внимания. В противном случае существует риск никогда не завершить краткий обзор начал теории управления. И хотя она с первого взгляда кажется непонятными техническими дебрями, это и есть часть процесса перехвата в более детальном рассмотрении.
«Время, вперед!»
Чтобы повысить точность управления движением, необходимо увеличить быстродействие всех компонентов системы управления полетом. Это подразумевает использование быстрых алгоритмов работы, а также повышение скорости реакций измерительных систем, электронной начинки и исполнительного сегмента: реактивных двигателей и системы подачи рабочего тела. Вероятно, потребуется масштаб времени в микросекундах (одна миллионная секунды), в котором будут выполняться операции звеньев системы.
Микросекундное время сложнее, чем миллисекундное. Последнее применяют при испытаниях ракет, его передают пункты системы единого времени ПП-СЕВ, снабжающие миллисекундным временем всю остальную регистрирующую технику. На каждом кадре пленки фототеодолита оптической станции траекторных измерений ФРС-2, работающей по оптической цели (например, боеголовке в атмосфере), всегда на вращающейся шкале отображается текущее миллисекундное время. Без него станцию оценят ниже по боевой работе, так как кадр без точной привязки времени нечитаем, траекторная информация утеряна.
Микросекундный масштаб применяют там, где большая выделяемая мощность не дает много времени для управления процессом. Его используют в управлении ядерными зарядами, требующими высокой точности действий. Такой масштаб времени может понадобиться и для управления движением перехватчика ради точности наведения. Максимальное быстродействие будет особенно необходимо при значимых углах пересечения траекторий цели и перехватчика.
Угол захвата: просто, посложнее, достаточно сложно.
Наибольшую простоту представляет лобовое сближение. В таком случае траектории цели и перехватчика совпадают, а цель всегда находится прямо перед перехватчиком. Не требуется маневрирование или расчёт времени встречи – в этом случае столкновение неизбежно.
В реальности пути цели и перехватчика пересекаются под углом (при успешном наведении).
Важно организовать одновременное прибытие обоих в точку пересечения.
Для этого нужно регулировать скорость не только по направлению (изменяя траектории для создания общей точки), но и по величине, чтобы не опоздать или не пройти точку раньше цели.
Чем ближе цель, тем быстрее превращается в видимую область для перехватчика, а изгиб его траектории при самонаведении становится более выраженным: боковая перегрузка увеличивается, достигая максимума перед столкновением. В зависимости от метода наведения возможен финальный отрезок без перегрузок. Но только в том случае, если наведение безупречно; в реальности при сближении взаимное движение уточняется, и перехватчику требуются корректировки.
В зависимости от угла атаки изменяется вероятность перехвата: при лобовой атаке маневры противника могут снижаться до минимума, упрощая наведение и повышая эффективность удара. Перехват сбоку сложнее и уменьшает вероятность поражения. Нельзя гарантировать успешное уничтожение цели в каждом случае. Эффективность перехвата зависит от ситуации сближения и действий самого перехватчика. Вероятность попадания должна быть достаточной для принятия технической системы на вооружение.
Ракета: полет до нужного момента
Какую ракету использовать для запуска перехватчика? Для ускорения после старта необходимо быстрее разогнаться, чтобы свободный подъем на сотни километров в тормозящем гравитационном поле оставил на той высоте несколько километров в секунду скорости. Цель скоростная, времени на полет мало. Твердотопливный двигатель обеспечит стартовые перегрузки уровня 100 g, почти исключая потери разгона из-за гравитации. Управление ракетой в атмосфере возможно с помощью аэродинамики, через обтекание корпуса и рулевых крыльев.
Позади стратосферы воздух слишком разреженный для аэродинамики. Управление станет управляемо с помощью изменения направления потока газов: поворотом тяги двигателя, газодинамическими рулями в потоке сопла основного двигателя, отклонением части реактивной струи или небольшими дополнительными двигателями.
Управление ракетой отличается от управления истребителем-перехватчиком прежде всего тем, что ракета не летит сразу к цели, как перехватчик, а в расчетный район, который может быть в сотнях километров от текущего местоположения цели.
В связи с необходимостью непрерывного наблюдения цели ракета не будет применять самонаведение. Предпочтение отдаётся командному наведению: управляющие команды формируются наземным или корабельным центром и передаются на борт ракеты. Такой метод требует канала связи, что увеличивает массу ракеты и подвергает её помехам радиосвязи, несмотря на шифрование сигнала. Комбинированное наведение с использованием инерциального, командного наведения, астрокоррекции и GPS может повысить точность.
Динамика полета — 2
Ракете необходимо топливо для энергии, достаточной для высоты перехвата. Подъем на высоту и разгон — это не всё; энергию можно тратить и на повышение точности перехвата. Для этого добавим запас топлива для изменения курса ракеты на «более встречный», где, как помним, выше вероятность перехвата. Поэтому стоит провести в небе дугу с заходом в центр передней полусферы цели, что существенно упростит попадание.
Вопрос повышения эффективности перехвата можно решать с помощью энергии: дозаправка перехватчика топливом для его перемещения в пространство перед целью. Это эффективный прием разработчиков траектории полета, предоставляющий боевое преимущество.

Идеальная траектория не круглая, а скорее гиперболическая с выпрямленными сторонами, похожая на деревянный хомут над лошадью: наибольший изгиб приходится на участок разворота навстречу цели.
Ракета выходит в зону пространства, располагающуюся вперёд движения цели и ближе к её прогнозируемой траектории. В этой точке ракурс с целью благоприятный для встречи, и ракета успевает развернуться навстречу цели, лететь прямо на неё, а затем отделит перехватчик.
Примеры систем внеатмосферной борьбы
Первые ракеты для заатмосферного перехвата двигались по энергии нормально, но отличались низкой точностью наведения. Из-за этого сбивать цели осколками не получалось. Поэтому на них устанавливались специальные ядерные боевые части. Их радиус поражения компенсировал возможные промахи. Ракета 51Т6 «Азов» советского комплекса А-135 «Амур» с максимальной высотой поражения 670 километров имела длину/диаметр 20/2,5 метра и массу примерно 40 тонн.
Её оснащали термоядерными боеголовками мегатонного калибра: вес термоядерной мощности и её разницы не такой большой, поэтому в этом плане не стоит экономить.

С течением времени трехступенчатая противоракета SM-3 (разработки компании Raytheon, находящаяся на вооружении многих стран) продемонстрировала другие характеристики: при высоте поражения 1500 километров и длине/диаметре 6,5/0,5 метра масса составляет полторы-две тонны в различных модификациях. Ракета наводится на цель по командам корабельного комплекса базирования постепенно.
Две начальные ступени ускоряют ракету и выводят её за атмосферу, направив на встречный курс с целью. Третья ступень работает импульсами для точного управления скоростью и встречи с целью. После работы отсоединяется кинетический перехватчик с инфракрасным самонаведением, получая подсказки с корабля для поиска цели.

Его комплектуют матричной двухдиапазонной тепловой головкой самонаведения с криогенным охлаждением, которая обнаруживает цель на расстоянии 300 километров и более. В процессе перехвата аппарат может отклониться от первоначальной траектории до 3-3,5 километров, используя твердотопливную двигательную установку маневрирования и ориентации ТDACS массой всего пять килограммов.
Работа по теме динамики полета заслуживает внимания и детального рассмотрения.

Газогенератор на твердом топливе с несколькими зарядами топлива производит газ высокой температуры (2000 градусов Цельсия) и давления. Быстродействующие клапаны пропускают газ в блоки реактивных сопел с частотой 200 герц, то есть работа сопел происходит до 200 раз в секунду. Это миллисекундное время работы конечных устройств, одиночное срабатывание сопла за пять миллисекунд. Такое же время занимает конечное исполнение команд рабочими органами, клапанами и соплами.
Перед этим происходит измерение движения перехватчика, положения цели, вычисления математические задачи несколькими бортовыми процессорами и другие действия. Этот цикл занимает пять миллисекунд, что свидетельствует о высокой скорости работы бортовых систем: их работа основана на микросекундном уровне времени.
Российский комплекс противоракетной обороны А-235 «Нудоль», заменяющий А-135, проходит испытания. Помимо модернизированных ракет 51Т6, в состав войдут новые ракеты для неядерного перехвата. Из-за секретности характеристики и детали работы этих ракет, как и у SM-3, пока неизвестны.
Некоторые параметры могут быть лучше американского аналога. Уже проведено более десяти успешных испытательных пусков. 15 ноября 2021 года уничтожен отработавший ресурс спутник «Космос-1408» на высоте около 650 километров.
По многим обломкам спутника видно, что это был удар кинетического перехватчика. Это засорение космоса; но если просто посечь цель осколками без разрушения на части, радары не смогут определить, поражена ли она или нет. Придется запускать по ней новые ракеты до радарного подтверждения поражения через наблюдение ее фрагментации. Разбивание цели на куски ещё один плюс кинетического перехватчика — такое действие даёт доказательство поражения.
Существует множество технических систем, способных к перехвату в космосе, более трех примеров. Из-за многочисленных нюансов сравнения и перечисления оставим их за пределами обсуждения. Многие из этих систем несут службу, работают ежедневно, устанавливая рекорды боевой эффективности.
Недавние вести из космического поднебесья
9 ноября 2023 года Израиль провел боевой перехват на рекордной высоте. Баллистическая ракета «Буркан-2», происходящая от советского «Эльбруса» (Scud-B по западному классификатору), была запущена с территории Йемена в направлении Израиля в режиме боевого применения. Ее дальность составляет 1000 километров, что относит ее к ракетам средней дальности.
Радар EL/M-2080 «Грин Пайн» израильской разработки обнаружил пуск и передал данные о его траектории системе управления ПРО «Голден Цитрон». Система рассчитала возможность перехвата и направила информацию стартовым комплексам ракетной базы Таль Шакар. Оттуда была запущена двухступенчатая твердотопливная противоракета «Хец-3» («Стрела-3»), которая вывела в район перехвата кинетический перехватчик с инфракрасным телескопом. Перехватка произошла на встречном курсе со скоростью приближения около шести километров в секунду на высоте несколько ниже 100 километров.

Многие окрестили это первым боевым перехватом в космосе, однако сведения о высоте расходятся: фигурируют как 80 километров, что формально исключает статус космического перехвата.
Для физики среды и динамики полета разность высот в 80 и 100 километров несущественна и не препятствует перехвату. Пусть даже это не первый боевой полет в космосе, всё равно самый высокий боевой перехват.

12 декабря 2023 года США успешно провели испытательный заатмосферный перехват. Ракета-мишень с характеристиками движения ракеты средней дальности была запущена с воздуха из района Гавайев. С базы Ванденберг на берегу Калифорнии, входящей в Западный ракетный полигон, взлетела противоракета GBI разработки Boeing. Она входит в наземную систему противоракетной обороны на срединном участке полета цели GMD и стоит на боевом дежурстве (это пятый пример систем заатмосферного перехвата).
Ракета длиной 17 метров и массой 13 тонн, состоящая из трёх ступеней и работающая на твердом топливе, поражает цели на высоте до 2000 километров при удалении цели до 5500 километров. Заатмосферный кинетический перехватчик уничтожил цель в космосе, находящуюся на расстоянии 1000 километров от побережья Калифорнии.
Перехватчик EKV от Raytheon заслуживает более внимательного изучения. Диаметр изделия составляет 0,6 метра, длина — 1,4 метра, а масса — 64 килограмма. Маневрирует оно системой сопел, работающих на сжатом азоте, и оснащено электронно-оптической системой наведения с комплексной защитой от подсветок. Скорость перехватчика чрезвычайно высока — 10 километров в секунду. При встречном ударе по цели, движущейся со скоростью шесть-семь километров в секунду, итоговая скорость столкновения составит 16-17 километров в секунду.
Выделенная энергия равна взрыву тонны тротила. Она достаточно сильна, чтобы поразить цель, а также испарить её фрагменты и осколки, оставляя почти никаких кусков, опасных для спутников. Это ещё один интересный метод перехвата в космосе.
Последнее повествование – и завершена моя летопись.
Об атмосфере перехвата можно рассуждать бесконечно: чем глубже погружаешься, тем сложнее и интереснее детали. Возможные решения могут быть очень разными, иногда даже противоречивыми.
Мы стремились обнаружить отличия между вариантами, а через них — полноту и обширность области применения. Для сопел маневрирования возможно применение горячего порохового газа или холодного азота. Каналом наблюдения цели могут быть тепловой, электронно-оптический и радиолокационный средства. Длина и масса ракет разнятся в десятки раз; скорости перехватчиков, высота и дальность поражения — в разы. Все это реализуется, воплощая самые разнообразные задумки разработчиков в конкретных изделиях.
Дальнейшее развитие перехватов, отработка новых идей, концепций и технических решений продолжается интенсивно. Возможен возврат США к программе Multiple Kill Vehicle для нескольких кинетических перехватчиков в одной ракете: то, что раньше было малоэффективным, может стать эффективным на новом технологическом уровне. Или появление групповых целей — адаптация и распространение технологий разделяющихся боеголовок уже для ракет вроде «Скадов» и других оперативно-тактических ракетных комплексов и систем средней дальности. Израиль, обладатель целого ряда ракетных комплексов, продолжит развивать противоракетную оборону.
Повышение доступности ракетного оружия, способного покинуть атмосферу, приводит к усилению разработок систем его противодействия. Будущее прояснит новые подходы и технологии заатмосферного перехвата в различных аспектах этой задачи.