Большинство из нас хотя бы раз испытывали «испанский стыд», или «эмпатическое смущение». Простыми словами, это чувство неловкости за действия других людей. Ученые решили проверить, работает ли это с роботами.
Несмешное выступление юмористов, пение «безголосых» артистов или сумасшедшие танцы подвыпивших коллег на корпоративе — все это повод почувствовать так называемый испанский стыд.
Одна из самых частых причин — развитая эмпатия. Дело в том, что люди часто бессознательно проецируют неловкую ситуацию на себя и испытывают чувства, которые возникли, если бы они сами попали в нее.
Эмпатия активизирует участки мозга, связанные с болью. В итоге стыд за других может приводить к физическому ощущению неловкости. Кроме того, эмпатическое смущение может возникать из-за повышенного чувства ответственности и даже страха быть отвергнутым.
Однако все это касается отношений между людьми. В последнее время с ростом использования роботов и виртуальных платформ в различных сферах жизни шансы на взаимодействие с роботами, искусственным интеллектом значительно возросли. Поэтому, как считают ученые, с роботами тоже нужно уметь строить хорошие отношения. Но способны ли мы сопереживать им?
В предыдущих исследованиях ученые предоставили физиологические доказательства способности людей сопереживать боли, которую испытывают роботы. Например, в 2014 году обнаружили аналогичную активацию в лимбической системе участников во время наблюдения за жестокими взаимодействиями человека и робота.
В этой и других подобных работах участники сообщали о более высоком уровне сочувствия к роботам, похожим на человека, и меньшем — к роботам, выглядящим просто как механические предметы. Теперь ученые из Технологического университета Тойохаси (Япония) сосредоточились не на жалости, а на другой эмоции — «эмпатическом смущении». Исследование опубликовано в журнале Scientific Reports.
Всего ученые оценивали два основных аспекта эмпатии: эмпатическое смущение и когнитивную эмпатию. Если первое относится к способности разделить эмоциональный опыт смущения другого человека, то второе предполагает понимание и оценку его чувств. Участников попросили дать субъективные оценки по семибалльной шкале Лайкерта, оценивая как собственное эмпатическое смущение, так и свою оценку смущения актера в каждом сценарии.
Кроме того, исследователи проверяли изменение проводимости кожи для объективной оценки физиологических реакций участников. Изменение проводимости кожи считается признанным индикатором эмоционального возбуждения, позволяющим понять интенсивность эмоциональных переживаний.
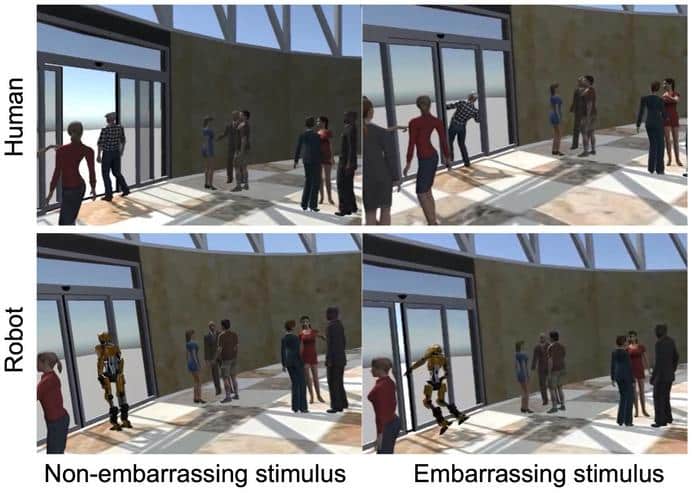
Ученые использовали виртуальную реальность (VR) для моделирования среды, в которой участники были погружены в действия персонажа-робота или человека, переживающего неловкие ситуации среди толпы людей. В качестве контрольного условия создали обычные сцены для тех же ситуаций. Их сравнили с субъективными оценками и реакциями проводимости кожи, полученными в «смущающих условиях».
Через 15-17 секунд после каждого испытания с актером происходило смущающее или не смущающее событие. Каждый сеанс длился от 30 до 40 секунд, и проводимость кожи измерялась на протяжении всего сеанса. В конце испытания участники ответили на вопросы в анкете о том, как они себя чувствовали во время испытания.
Участники сообщили, что испытывали как эмпатическое смущение, так и когнитивную эмпатию по отношению к людям и роботам, когда те попадали в неловкие ситуации. Однако заметное различие выявили при сравнении эмпатических реакций. Когнитивная эмпатия оказалась сильнее для актеров-людей по сравнению с актерами-роботами.
Всего провели несколько экспериментов. Например, испытуемым предложили 16 сценариев, в котором было два типа участников (человек и робот), две неловкие ситуации и четыре обычные. Их показывали по одному в случайном порядке, пока участники погружались в виртуальную среду, соответствующую каждой ситуации. В начале каждого испытания участников просили осмотреться вокруг, найти актера и сосредоточиться на нем до конца испытания.
Кроме того, участники демонстрировали более высокий уровень эмоционального возбуждения при наблюдении за человеческим аватаром, перемещающимся по смущающим сценариям, по сравнению с аватаром-роботом.
По мнению ученых, эти результаты дают представление о сложной динамике человеческого сочувствия к роботам.
«Исследование не только расширяет наше понимание человеческой эмпатии, но и имеет значение для таких областей, как робототехника, психология и взаимодействие человека и компьютера. Поскольку общество продолжает внедрять робототехнические технологии, эти открытия открывают путь к дальнейшему исследованию эмоциональных аспектов нашего взаимодействия с машинами», — заявили авторы.