Группа ученых разработала роботизированный катетер, способный самостоятельно добраться до нужного клапана в сердце и провести необходимую операцию, используя алгоритмы машинного обучения. Это знаменует собой начало перехода от роботизированных инструментов к настоящим операциям с помощью роботов.
Американские хирурги впервые в мире использовали экспериментального самоходного робота в ходе операции: специальный роботизированный катетер самостоятельно нашел путь к необходимому клапану в сердце свиньи. Катетер достиг нужного места, используя искусственный интеллект, камеру и специальные алгоритмы, которые помогают роботу выяснить, к какому типу ткани он прямо сейчас прикасается и куда нужно двигаться, чтобы достичь цели.
Новый робот, описанный в статье, опубликованной в журнале Science Robotics, может ознаменовать собой начало перехода от роботизированных хирургических инструментов к настоящим операциям при участии роботов — эти автономные устройства могут облегчить работу врачей.
В современной медицине становится популярной неинвазивная хирургия, предполагающая минимум разрезов: так пациент испытывает меньше боли при восстановлении, процесс проходит быстрее, а риск инфекции заметно снижается. Именно в рамках неинвазивной хирургии и будет действовать новый робот, который стал изобретением сотрудников Гарвардской медицинской школы (США), Университета Страсбурга (Франция) и Тайбейской больницы для ветеранов в Тайване.
Созданный ими катетер — вернее, метод его движения — можно сравнить со способом, который используют раки и тараканы: они ориентируются с помощью усов, определяя, что находится перед ними и куда двигаться дальше. Так же ведет себя человек в темноте, на ощупь определяя стены и пространство вокруг. Алгоритм машинного обучения, отвечающий за движения катетера, помогает ему двигаться вдоль той или иной ткани в организме человека — ИИ заранее обучили различать кровь, ткани стенки сердечного желудочка и аортального клапана. Кроме того, датчик анализировал силу давления катетера на клапан, чтобы тот не повредил бьющееся сердце.
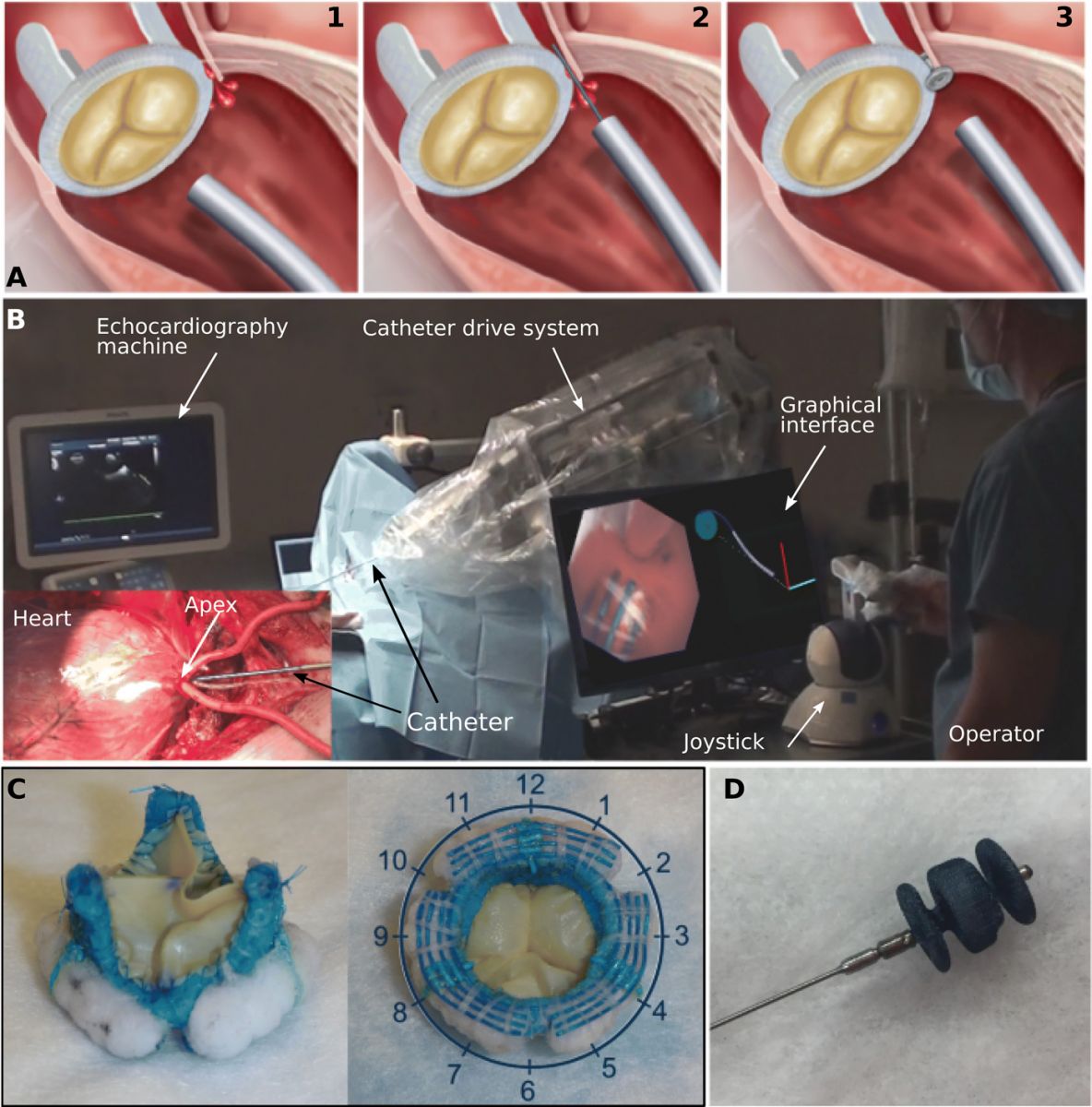
В качестве примера была использована операция по закрытию аортальной приклапанной утечки — она возникает у пациентов с искусственным клапаном, позволяя крови изливаться обратно в сердце. Для исправления этой ситуации и нужен катетер, который бы работал непосредственно внутри организма.
Робота проверили в ходе операции на пяти свиньях, которым предварительно установили искусственные аортальные клапаны, заранее требующие хирургического вмешательства. Для возможности сравнения специалисты провели три операции: в одной катетер был полностью автономен, во второй им удаленно управлял врач, а в третьей всю работу хирург делал самостоятельно, вручную.
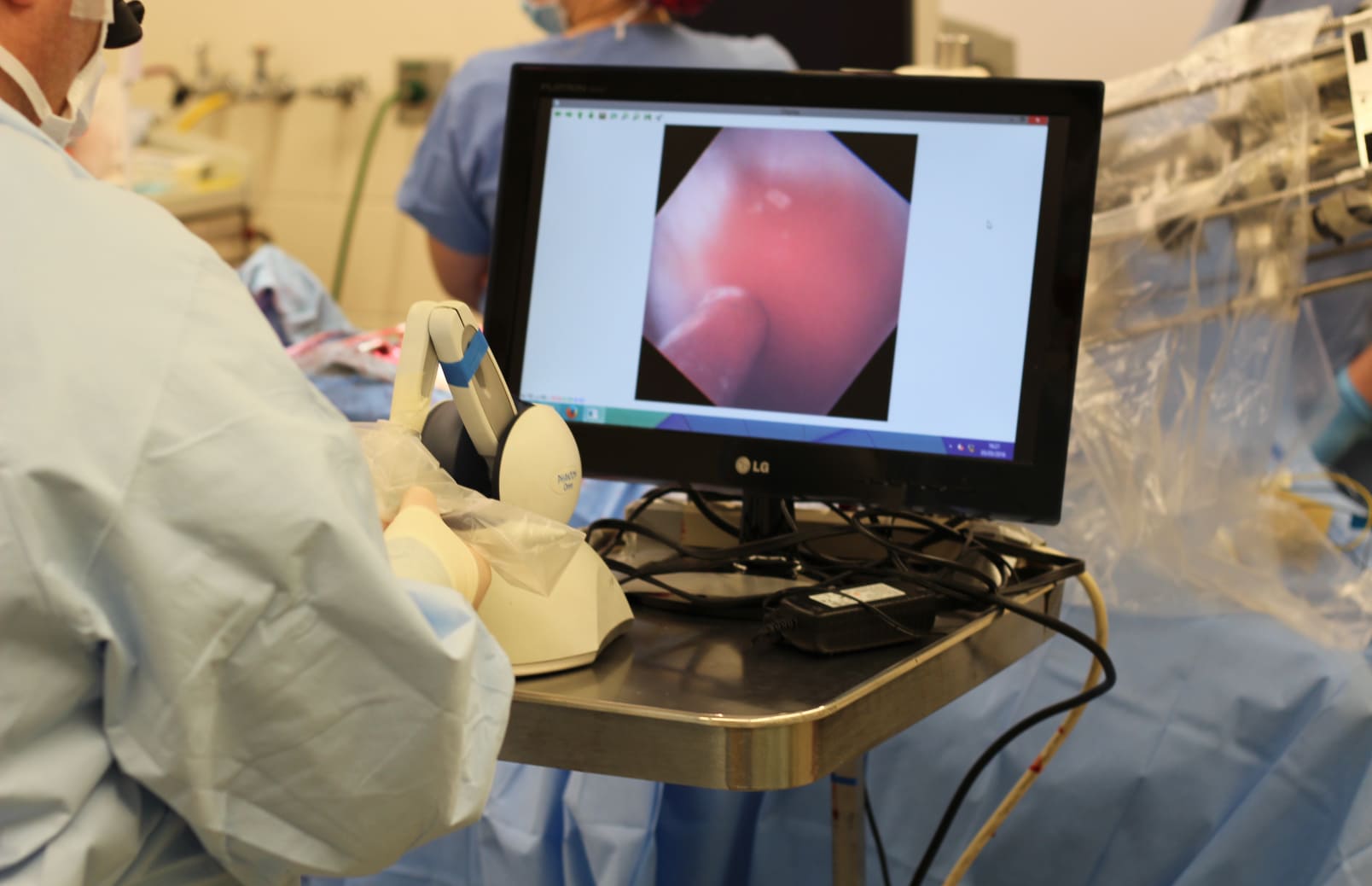
После введения в сердце робот смог достичь необходимого клапана, параллельно снабжая ученых визуальными данными с помощью тактильного зрения. Помимо этого, специалисты могли заглянуть внутрь сердца при помощи миниатюрной камеры и светодиода, которые также установлены на катетере. Чтобы добраться до нужного клапана, автономному роботу потребовалось немного больше времени, чем хирургу, однако это объяснимо: тот факт, что он двигался на ощупь, означает, что он выбрал самый длинный путь. В целом автономный катетер провел 89 успешных операций из 90.
«Время навигации было статистически эквивалентно для всех способов, что, на наш взгляд, впечатляет, учитывая, что робот находился в наполненном кровью бьющемся сердце и пытался достичь цели в миллиметровом масштабе на конкретном клапане», — говорит старший автор исследования, доктор Пьер Дюпон (Pierre Dupont), добавляя, что способность робота визуализировать окружающую среду может устранить необходимость в рентгеноскопической визуализации, которая обычно используется при подобных операциях и подвергает пациентов воздействию ионизирующего излучения.
Некоторые кардиологи, знакомые с работой команды Дюпона, уже предположили использование подобных роботов для выполнения рутинных задач по картированию, а также для проведения операций в тех регионах мира, где не хватает высококвалифицированных хирургов.