Как насекомое массой несколько миллиграммов воспринимает мир под лапами? Ученые обнаружили, что комнатные мухи используют специальные сенсоры в конечностях для точного измерения силы и ее изменения во времени. Исследование не только раскрыло особенности биомеханики насекомых, но и поможет в создании нового поколения роботов.
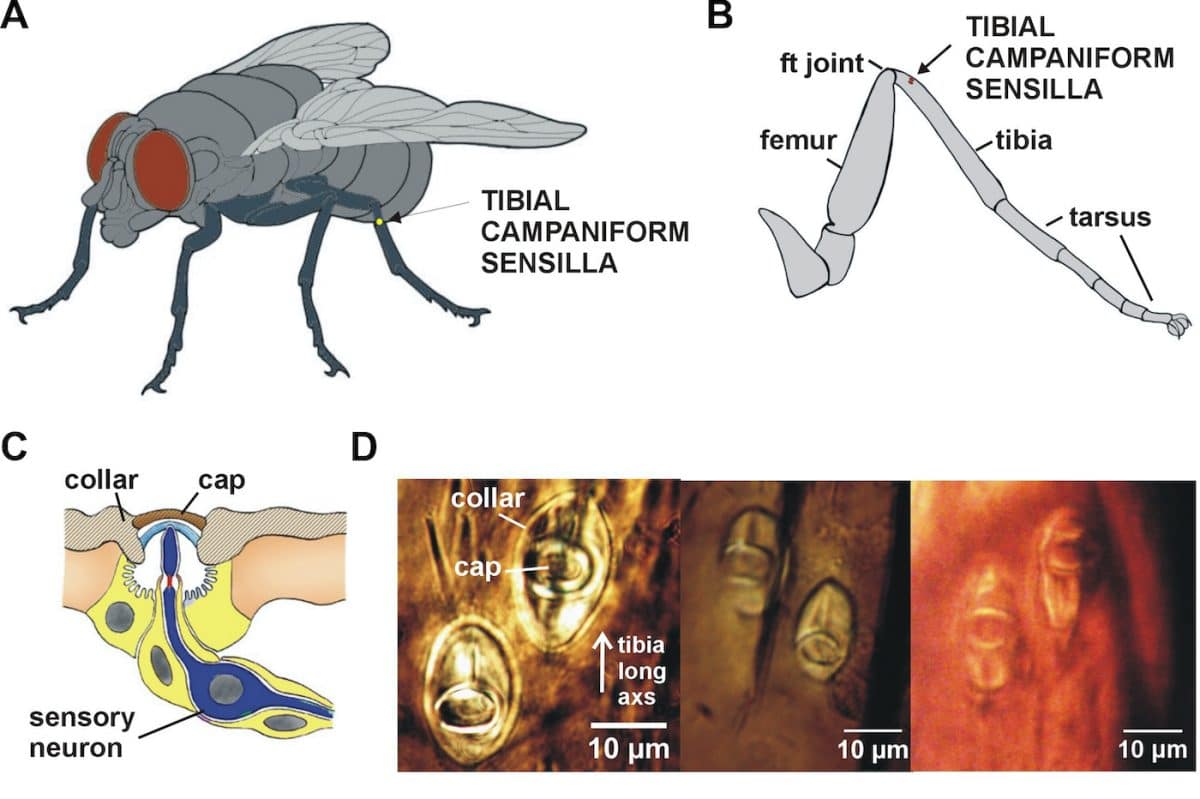
Биологи много лет исследуют восприятие животными сил, необходимых для передвижения и поддержания равновесия. У крупных членистоногих, таких как тараканы и палочники, эти механизмы достаточно изучены — главное значение имеют куполовидные сенсиллыВнутри экзоскелета у этих существ находятся особенные механорецепторы. Неизвестно, как устроена подобная система в мелких насекомых с малым весом, например, у обычных комнатных мух. Calliphora vicina.
Исследования на мухах часто сосредотачивались на плодовой мушке дрозофиле. Её генетические преимущества очевидны, но малый размер ограничивал возможности прямого изучения сенсорных элементов. Сенсоры на крыльях и жужжальцах мух были подробно исследованы, но активность сенсоров именно на их ногах оставалась практически неизвестной для физиологов.
Новое исследование, результаты которого опубликованы в журнале Journal of NeurophysiologyМеждународная команда ученых исследовала поведение сенсилл, расположенных на голени задней лапки комнатной мухи.
Во время эксперимента учёные регистрировали активность сенсил на голени задней лапки мух, применяя к лапке контрольные усилия разной скорости и амплитуды. Получилось, что сенсилы комнатной мухи очень чувствительны не только к величине приложенного усилия, но и к скорости его изменения.
Сенсорная реакция характеризовалась гистерезисом, то есть зависела от предыдущего состояния системы, а также высокой чувствительностью к коротким падениям нагрузки. Даже незначительные и кратковременные снижения силы вызывали сильное подавление активности сенсоров.
Это показало, как важен для баланса и движения контроль силы воздействия.
Биологи использовали математическую модель, предназначенную для описания работы сенсоров у крупных насекомых, чтобы проверить свои наблюдения. Модель точно воспроизвела реакции сенсоров комнатной мухи. Это подтверждает идею о том, что обнаружение силы — универсальная стратегия, помогающая контролировать мышцы и поддерживать равновесие у разных видов насекомых независимо от их размера.
Высокая чувствительность способствует поддержанию равновесия при ходьбе и сигнализирует о скольжении ноги, которое может нарушить опору тела, даже до его перемещения. Сенсилы мух считывают силу в диапазонах, соразмерных их минимальному весу, но их активность также подавляется очень малыми кратковременными снижениями силы.
Моделирование выявило, что отличительные черты куполообразных сенсилл, например чувствительность к скорости и гистерезис, являются естественно возникающими свойствами примененной математической модели. Она точно имитирует реакции датчиков мухи на разные раздражители, будучи настроена только на один простой тип воздействия.
Данный подход к моделированию может способствовать лучшему пониманию настройки сенсоров у разных животных.
Он также открывает путь к улучшению перемещения роботов посредством имитации реакции настоящих сенсорных систем на силу, объединяя тем самым фундаментальные биологические открытия с практичными инженерными разработками в области биомеханики и робототехники.
