К середине века человекоподобные роботы обыграют людей в футбол, через десять лет начнут распространяться операции по вживлению имплантатов в организм человека, а уже сейчас по трассе Москва ― Санкт-Петербург поедут беспилотники. Это возможные перспективы внедрения свободной робототехники в общество. О приоритетах ученых, создающих автоматических помощников, факторах, тормозящих робототехнику и моральном выборе ― в интервью с профессором РАН, доктором технических наук, главным научным сотрудником Института проблем управления им. В.А. Трапезникова РАН Романом Валерьевичем Мещеряковым.

Роман Валерьевич Мещеряков.
Фото: Ольга Мерзлякова / «Научная Россия»
В каких направлениях работают ученые, создающие современных роботов? Какие материалы, вычислительные мощности и источники энергии нужны для уверенного развития робототехники? Как этические конфликты ограничивают широкое внедрение свободной робототехники?
― Одна из озвученных целей современной робототехники ― создать к 2050 г. команду роботов-футболистов, способных выиграть или сыграть на равных с командой людей. Насколько реальна эта задача, и в каких еще направлениях работают робототехники?
― Действительно, существует такая инициатива, называющаяся RoboCup. Участники этого проекта планируют, что к 2050 г. команда роботов-футболистов сыграет с футболистами-людьми и выиграет. Это движение развивается с 1997 г., и каждый год на соревнованиях задачи для роботов усложняются. Сначала были ровные поля, мяч красили в определенный цвет, а роботы представляли собой конструкцию собаки. Потом появились антропоморфные роботы, а мяч раскрасили в официальные цвета мировых чемпионатов. Потом появилась трава: сначала высотой 10 мм, потом 20 мм и 30 мм. Не все роботы могла даже стоять на ней, выигрывала команда, у которой были шипы, а «участники» оказались способны встать.
Эти соревнования проходят по нескольким направлениям. В отдельной категории соревнуются антропоморфные роботы, созданные по образу человека, с определенным центром масс, длиной конечностей и мощностями. Параллельно выступают маленькие роботы-футболисты в форме маленьких кубиков, играющие в два-три паса. Также есть лига Middle Size, в которой играют настоящим футбольным мячом и роботы имеют большой размер и массу. Два года назад я играл в международной команде против таких роботов. Конечно, мы ― люди выиграли 4:1. Робототехника в таком контексте с одной стороны ― игра, но с другой работа, непосредственно выполняющаяся в научных институтах и университетах.
Сервисные роботы, манипуляторы, автономные автомобили, спутники ― все это робототехника, то есть то, что создал человек, чтобы заменить свое участие в некоторых рутинных операциях. Достижение этой цели, предоставление человеку свободы для решения более творческих и нетривиальных задач, которые не способен решить робот и есть естественный путь развития робототехники.
Возвращаясь к инициативе RoboCup: среди прочего там есть лига домашней робототехники. Например, человек вернувшись с работы, садится в кресло и говорит роботу: «Метнись на кухню, вскипяти чайник и принеси мне заваренный зеленый чай». Робот должен найти кухню, найти чайник, проверить, есть ли в нем вода, при необходимости налить воду, поставить и вскипятить чайник, найти нужную заварку, приготовить чай и принести человеку. Это одно из реальных заданий.
― В какой-то степени устройства справляются с этими заданиями?
― Только в какой-то степени.
― Для игры в футбол ученые создают антропоморфных роботов. Хотя, казалось бы, на четырех конечностях, или на колесах это реализовать проще, причем касается это не только футбола. Зачем нужны антропоморфные роботы, насколько функциональна и эффективна эта форма?
― Человекоподобная форма роботов не эффективна, но она интересна с точки зрения постановки задач, а кроме того, разработчики пытаются занять роботами приспособленные для человека рабочие места и наборы инструментов. То есть антропоморфный робот может взять паяльник или отвертку, сесть на водительское место автомобиля, использовать какие-то специальные инструменты в случае чрезвычайных ситуаций. По сути, антропоморфный робот это «аватар» человека, которого можно использовать в различных ситуациях. Но при этом антропоморфные и часть биоморфных роботов не эффективны. Вспомним колесо: его нет в живой природе, а как говорили великие авиаторы: «Человек только тогда научился летать, когда перестал махать крыльями». Человек научился летать только с появлением плоского крыла.
Идут серьезные споры о том должен ли робот быть похожим на человека. Эффект «зловещей долины» показывает, что чем больше робот похож на человека, тем больше его пугаются. Поэтому антропоморфность частично должна быть, для того, чтобы роботы могли использовать привычную для человека среду. Но не стоит делать их слишком человечными.
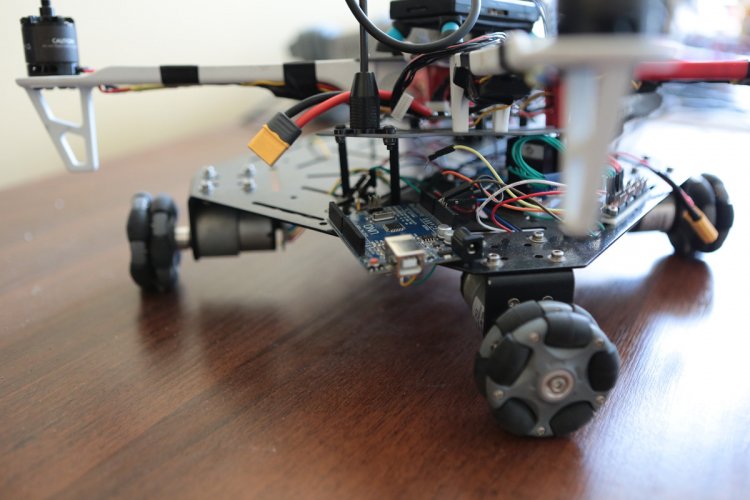
В лаборатории Института проблем управления им. В.А. Трапезникова РАН.
Фото: Ольга Мерзлякова / «Научная Россия»
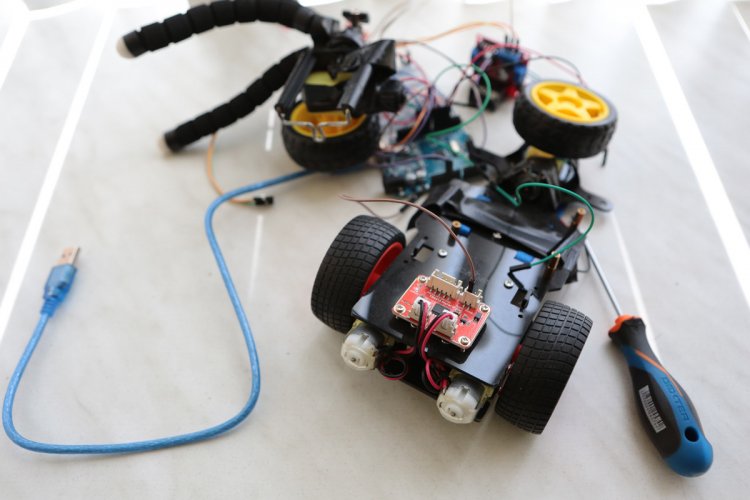
В лаборатории Института проблем управления им. В.А. Трапезникова РАН.
Фото: Ольга Мерзлякова / «Научная Россия»
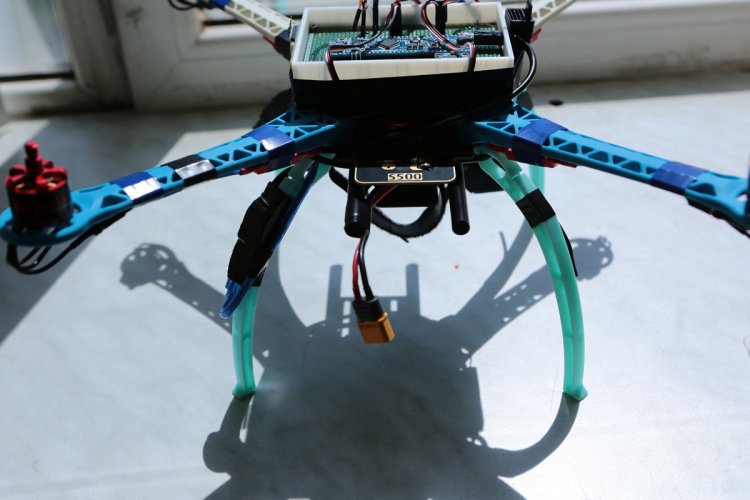
В лаборатории Института проблем управления им. В.А. Трапезникова РАН.
Фото: Ольга Мерзлякова / «Научная Россия»
― Любой робот, даже распространенные квадрокоптеры или роботы-пылесосы ― это консолидация абсолютно разных наук. Какие основные научные составляющие включает в себя современная робототехника?
― Конечно, робототехника – это очень широкое направление, включающее механику, информатику, электронику… Робот в привычном нам представлении, способный автономно перемещаться и совершать поступки появляется только после того как мы объединяем все составные части.
Это комплексная задача, и интерес в том, чтобы за счет опытной конструкции, которую мы собираем, внедрять новые технологии и привлекать их в нормальную жизнь.
Новые материалы ― очень важное направление робототехники. В большинстве случаев требуется, чтобы материалы были с одной стороны прочными, а с другой ― мягкими или податливыми, чтобы их можно было обрабатывать. Но резина со свойствами титана ― это несбыточная мечта и всегда приходится чем-то жертвовать. Поэтому для конструктива роботов могут использоваться так называемые метаматериалы, которые позволяют удобно использовать устройства двух-трех композициях и плоскостях.
Кроме того, существует мягкая или софт-робототехника, частично ориентирующаяся на биоподобие. Например, роботы-кальмары, хобот известной компании Festo, или птицы-роботы ― в их создании существенную роль тоже играют материалы. Одна из старых задач ― создать искусственную мышцу, которая может заменить электродвигатель. Дело в том, что двигатели в суставах тех же антропоморфных роботов работают в старт-стоп режиме, а нам нужно большее. Это также задача новых материалов: они должны подбираться под конкретную среду исполнения и формирования единой комплексной концепции платформы, на которую устанавливаются.
Второе серьезное направление ― это энергетика роботов, и в этой области значительную роль также играют материалы, потому что при минимуме веса робот должен иметь большую энергоемкость. Надо соблюдать баланс: чем больший запас энергии мы хотим дать роботу, тем большую грузоподъемность надо обеспечить. То есть мы не можем создать маленький коптер, способный летать трое суток без дополнительных энергоресурсов. До какого-то момента это соотношение эффективно, а потом вся энергия уходит на то, чтобы поднять батарейку.
― Я слышал тезис о том, что, теоретически, современная наука может реализовать практически любые технические возможности аппаратов, но не в состоянии обеспечить их нужными объемами энергии для эффективной работы…
― Все верно, достаточно вспомнить старый советский анекдот. Идет мужик по улице, с двумя огромными чемоданами. Встречный прохожий спрашивает у него время. «12 часов 16 минут, 44 секунды, 56 микросекунды, 16 наносекунды, давление 734 мм рт.ст.», ― отвечает мужик. «Хорошие у тебя часы», ― говорит прохожий. «Часы-то хорошие, вот только батарейки в чемоданах очень тяжелые».
Именно баланс соотношения энергетики с ресурсами, требующимися для работы робота, ― важная задача. При переходе из класса, например, маленьких квадрокоптеров в большие требуется и дополнительное обслуживание, и регистрация, и условия перевозки: много различных обстоятельств, которые, к сожалению, не позволяют найти этот баланс очевидно.
― А что касается вычислительных мощностей для обеспечения робототехники?
― В области вычислительных мощностей перед нами стоят очень увлекательные задачи. Существующим вычислителям не хватает ресурсов, и они достаточно энергоемкие. Говорят, что любую задачу решат нейросети ― это неправда, это только одно из решений, которое может упростить жизнь. Классические аналитические решения во многих случаях будут более эффективными. То есть, если с помощью сценария мы можем описать большее количество решений, то используя заранее обученные данные, сможем предусмотреть только ранее существовавшие ситуации.
Если посмотреть на зарубежные аналоги, то видно, что в основном идет экстенсивный путь развития: увеличение вычислительных ресурсов плохо сказывается как на алгоритмизации, так и на формализации постановки задач. Во времена, когда я только начинал преподавать, было проще за пять минут написать программу, которая решает час, чем убить день на написание эффективной программы, которая решала бы задачу за пять минут. Увеличение вычислительных мощностей ухудшает подходы к решению задач: казалось бы, задача решена и на этом можно успокоится.
Эффективные вычислительные ресурсы, использование туманных и облачных вычислений, перераспределение задач будут перспективными в ситуациях, когда два или три робота работают совместно, например, картографируют одну и ту же местность. Они смогут обмениваться не только знаниями о поверхности, но и вычислительными задачами. Когда мы идем, например, в поход, один берет одно снаряжение, другой другое, третий ― третье, и в процессе похода мы меняемся этими ресурсами, а также знаниями и навыками. Этого же надо добиться в области создания роботов, которые смогут ставить задачи другим.
― То есть при совместной работе роботы должны сами формулировать задачи для своего «круга общения»?
― Не то что «должны», а будут это делать. Роботы, функционирующие в одной среде и выполняющие одинаковые задачи, например, ходить строем или соблюдать формацию в небе ― это не вчерашний, а позавчерашний день. Необходимо выполнять реальный функционал. Например, в области сельского хозяйства: один беспилотник должен облететь территорию и найти проблемы, другой ― доставить туда необходимые ресурсы, третий ― убрать урожай, четвертый ― контролировать это взаимодействие или в автономной группе, или с использованием человека. Кстати, человека мы сегодня тоже используем как часть вычислительной среды робота. В некоторых случаях человек решает задачу быстрее робота, тогда почему бы нам не предоставить роботу результат решенной человеком задачи?
До сих пор не решена проблема мурмурации птиц, то есть движения «стаи» тех же беспилотников так, чтобы они летали подобно изменению центра масс группы птиц в стае. Нам нужны устойчивые, точные и быстрые взаимодействия между роботами, которые при этом должны быть относительно вычислительно емкими. Используя бинокулярные камеры для определения расстояния нужен нетривиальный алгоритм и процесс вычислений идет недостаточно быстро. При этом птицы определяют расстояние сравнительно легко и быстро.
Развивая мысль о необходимости вычислительных ресурсов: стоит смотреть не только в сторону вычислений в классической двоичной системе фон-неймановской архитектуры, но и вернуться к аналоговым вычислителям, спайковым сетям, то есть использованию полного спектра нейроподобных алгоритмов для формирования событийной модели для сценарного поведения беспилотного летательного аппарата. Если проще, то робот должен определять свое место, положение, цели и задачи в конкретный момент времени. Если он этого не определяет, значит, он не работоспособен.

На записи интервью с Романом Мещеряковым.
Фото: Ольга Мерзлякова / «Научная Россия»

На записи интервью с Романом Мещеряковым.
Фото: Ольга Мерзлякова / «Научная Россия»
― Сегодня популярна тема развития квантовых компьютеров. Вы рассматриваете перспективу их интеграции в робототехнику?
― Во-первых, стоит упомянуть оптические компьютеры с меньшим энергопотреблением, чем современная электроника.
А квантовые компьютеры, конечно, важны: они на два порядка более эффективны. И, хотя их использование в нынешних условиях представить невозможно, я считаю, что за ними будущее, и такие устройства позволят сохранить темп роста вычислительных возможностей и физики вычислений.
Если нам удастся перейти на квантовые вычисления, это будет революция и изменится область информационной безопасности. С одной стороны, все криптографические схемы будут взламываться просто, а с другой ― у нас появится абсолютно защищенный квантовый канал, перехват в котором физически невозможен. Думаю, что существующие решения кардинально изменят структуру вычислительной среды. Хотя хотелось бы, чтобы кто-то из будущих нобелевских лауреатов изменил и фон-неймановскую архитектуру, и мы могли как-то кардинально изменить постановку задачу вычислений, а не управлять только данными и памятью.
― Выступая с докладом о робототехнике на общем собрании профессоров РАН весной 2023 г. вы упомянули, что один из факторов, тормозящих внедрение свободной робототехники, это «проблема вагонетки». Почему эта задача мешает созданию роботов?
― Напомню, в чем заключается эта проблема. По рельсам несется вагонетка, около рычага, переключающего стрелку, стоит человек, который должен принять решение. Если он ничего не сделает, погибнут пять человек. Если он переключит стрелку, то умрет всего один. Примет ли человек решение о переводе стрелки?
В робототехнике эта проблема может выражаться в ситуации, когда беспилотный автомобиль несется по трассе и возникает выбор: либо сбить человека, который переходит дорогу, либо съехать в кювет и убить человека, который находится внутри. Это задачи, которые решаются только этически-нравственным выбором. Я знакомился с работами немецких ученых, которые сравнивали, как люди отранжируют других людей и животных в ситуации, когда решается вопрос жизни и смерти. По статистике, в первую очередь спасали бы беременных женщин, молодых женщин, женщин среднего возраста, потом кошек… В конце списка ― мужчины и люди старшего поколения. Это вопрос того, что нас делает людьми? Мы выбираем не по важности, или оценивая, кто принесет большую пользу, а по мановению души. У нас есть мораль и нравственность, хотя этические нормы могут различаться.
Но говорить о моральной или этической стороне роботов нельзя, это исключительно человеческие качества. Мы не можем, например, требовать соблюдения условий этики от искусственного интеллекта. Мы можем лишь предъявлять требования к сведениям, которые он предоставляет человеку, а уже человек может делать выводы. Допустим, ИИ просканировал социальные сети, и оказалось, что человек придерживается взглядов, которые не до конца разделяет общество. В результате стоит, например, не выдавать человеку кредит или не пускать в кафе? Это должен решать не искусственный интеллект. А данные, которые он предоставляет, не должны влиять на этическую и моральную оценку человека.
Возникают сложности и с вопросом ответственности. Беспилотник упал, допустим, на корову. Кто должен возместить ущерб?
― Хозяин беспилотника или его разработчик?
― Или регулятор, который разрешил полеты, или эксплуатант, который непосредственно проводил полет. Сегодня активно прорабатывается вопрос о страховании рисков, и если регулярно платить банкам за страховку всегда будет финансовая граница компенсации ущерба.
― Не все ситуации можно решить деньгами…
― Именно. Если тот же автомобиль Tesla врежется из-за того, что неправильно определил какой-то из параметров, возникает вопрос, кто будет нести ответственность за жизнь человека? И неизвестно, не появятся ли требования об отмене всех беспилотников…
Мы это уже проходили, и никогда отказ от развития не приносил ничего хорошего. Мы пересели с лошадей на трактора и не можем откатиться обратно, хотя можно попробовать. У читателей и зрителей этого интервью есть кредитные или дебетовые карточки. Мы привыкли ими пользоваться, хотя когда их только вводили, было много разговоров о «чипировании». Те же смартфоны, которые мы не контролируем: они фиксируют геолокацию, могут без нашего разрешения включать видео или записывать аудио.
Это вопрос контроля роботов: будут ли они за нами следить или будут помогать. Достаточно вспомнить фантастические фильмы, в которых робот требует от человека бегать или кушать зелень, а человек, возможно, хочет съесть стейк…
Но мы не можем держать роботов в стороне от себя, прогресс идет, и мы уже широко их используем. Я не знаю статистики по роботам-пылесосам: наверняка кто-то на них наступал, спотыкался и в результате умирал… Но в случае с роботами-манипуляторами таких случаев достаточно много: что-то засбоило, и робот убивал человека, который заходил в зону ограничений, несмотря на защитные механизмы. При этом практически на всех роботах есть «большая красная кнопка», позволяющая его выключить.
Сегодня существует инициатива ООН по недопущению принятия роботами решения о выстреле и уничтожении кого-либо. Россия широко участвует в этой работе и пропагандирует идею о том, чтобы робот не мог принимать собственный решения на борту о применении оружия по отношению к человеку. Пока это запрещено, но никто не мешает использовать технологии в тестовых целях, и готовиться к их использованию.
Мы говорим не только про войну: автоматические системы упростят жизнь человека во многих ситуациях. Нужно ехать, идти, копать, рыть, сеять, пропалывать… То есть заменять человека в рутинных операциях, оставляя простор для творчества.
― Какие прогнозы в отношении роботов строите вы? Когда стоит ждать широкого внедрения свободной робототехники?
― Я считаю, что свободная робототехника начнет внедряться в течение ближайших пяти лет, если появятся люди, которые готовы нести ответственность за возможные происшествия. Например, скоро в России по трассе М11 будут ездить машины с автоматическим пилотированием.
Еще более интересный процесс, который может начаться в ближайшее время ― это объединение человека с роботом. Я говорю об использовании инвазивных имплантатов, искусственных руках и ногах. Сегодня уже существуют искусственные конечности с открытым исходным кодом, то есть можно подстроить прошивку протеза, например, под свой тип ходьбы.
Взаимодействие с роботами начнет нести интеграционную функцию, то, что можно назвать киборгизацией. Думаю, что в течение десяти лет мы придем к тому, что роботов начнут использовать для улучшения определенных функций человека независимо от того, насколько это этично. Лично я считаю, что такое вмешательство не соответствует этическим нормам, даже в случаях, когда человек не в состоянии ходить, говорить, или выполнять определенные функции.
― Но ведь нет ничего плохого в установке, например, протеза руки…
― Я говорю об имплантатах, которые можно устанавливать в мозг. Сейчас в этой области есть определенные сложности, связанные с тем, что устройства очень быстро покрываются коллоидной тканью, но это проблема будет решена. Если мы минуем некоторые органы чувств, то быстрее будем реагировать на определенные обстоятельства. Зачем нам смотреть на объект, если можно установить камеру более широкого спектрального диапазона и передавать с нее информацию сразу в мозг, как это сегодня делается с искусственным ухом, когда электроды вживляются непосредственно в головной мозг.
― Но пока робототехника ― это дорого, и именно финансовый вопрос, в том числе, ограничивает ее широкое внедрение…
― Да, пока это в основном игрушки. Но развитие идет, и в некоторых странах уже есть отдельные территории, где робототехника широко внедрена в быт. Я был во Франции: там есть города, где живут пожилые люди и лица с ограниченными возможностями здоровья. Нанимать сиделок очень дорого, поэтому автоматизация и роботизация многих процессов в такой ситуации ― вынужденная мера. В Японии популярны искусственные животные, например, кошки или нерпы ― те с кем мог бы общаться пожилой человек. Это не необходимость завтрашнего дня, а существующая реальность. Конечно, купить SpotMini, чтобы выгуливать его на улице не всем по карману, но это интересная практика в качестве эксперимента.
Занимаясь робототехникой, мы должны оставаться людьми и развиваться в том, чтобы упростить жизнь человека, том числе и лицам с ограниченными возможностями. И главное ― не во вред всем окружающим.