Инженеры из США разработали новый подход, который позволяет роботизированной руке вращать объекты исключительно за счет прикосновения, не полагаясь на зрение, и при этом не поломать их, сообщает Калифорнийский университет в Сан-Диего. Статью, посвященную разработке, можно посмотреть здесь.
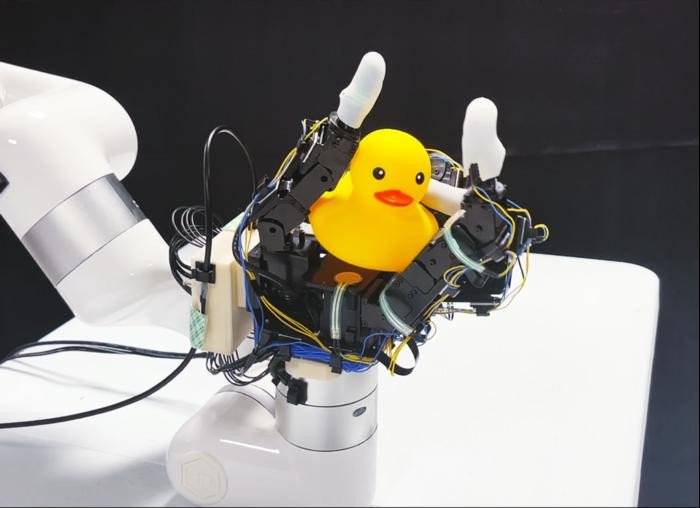
Тестируя новую систему, исследователи прикрепили 16 недорогих сенсорных датчиков к ладони и пальцам четырехпалой роботизированной руки. Датчики распределены по большой площади руки робота. Каждый датчик выполняет простую функцию и использует простые двоичные сигналы — касается или не касается, — чтобы робот мог вращать в руке разные предметы, не травмируя и не сдавливая их.
«Мы используем очень простое решение, — отмечают авторы работы. — Мы показываем, что для выполнения этой задачи нам не нужны подробности о текстуре объекта. Нам просто нужны простые двоичные сигналы о том, коснулись ли датчики предмета или нет, и их гораздо проще смоделировать и перенести в реальный мир».
Сначала разработчики обучили свою систему, запустив симуляции виртуальной руки-робота, вращающей разные объекты — в том числе неправильной формы. Система оценивает, к каким датчикам на руке прикасается объект в любой момент времени во время вращения. Он также оценивает текущее положение суставов руки и их предыдущие действия. Используя эту информацию, система сообщает роботизированной руке, какой сустав должен двигаться и куда в следующий момент времени.
Затем систему проверили на реальной роботизированной руке с объектами, с которыми система еще не сталкивалась. Роботизированная рука могла вращать их, не останавливаясь и не теряя хватки. Среди предметов были помидор, перец, банка арахисового масла и игрушечная резиновая уточка, которая была самым сложным объектом из-за своей формы. Рука-робот также смогла вращать объекты вокруг разных осей.
Сейчас команда работает над более сложным манипулированием: инженеры разрабатывают методы, позволяющие роботизированным рукам, например, ловить, бросать и жонглировать. В будущем их технология может помочь в разработке роботов, способных манипулировать объектами в темноте.
[Фото: Binghao Huang]