Дистанционно управляемые роботы для сбора лунной пыли стали на шаг ближе, согласно новому исследованию ученых из Бристольского университета. Команда смогла выполнить задачу по сбору образцов, управляя виртуальной симуляцией, которая затем отправляла команды физическому роботу, чтобы он повторял действия симуляции. Ученые смогли сделать это, наблюдая только за симуляцией – без использования физических камер – что означает, что этот инструмент может быть особенно полезен для удаленного управления роботом на Луне, сообщили авторы разработки на конференции International Conference on Intelligent Robots and Systems (IROS 2024).
Наряду с бумом лунных полетов в этом десятилетии, несколько государственных и частных организаций сейчас изучают, как лучше добывать ценные ресурсы, такие как кислород и вода, из легкодоступных материалов, таких как лунный реголит (лунная пыль). Дистанционная обработка реголита станет важным шагом в этой деятельности, поскольку сначала его нужно будет собрать с поверхности Луны. Кроме того, лунная пыль липкая и абразивная, и работать с ней придется в условиях пониженной гравитации.
Ведущий автор Джо Лоука из Бристольской школы инженерной математики и технологий пояснил: «Одним из вариантов может быть использование астронавтами симуляции для подготовки к предстоящим миссиям по исследованию Луны. Мы можем регулировать силу гравитации в этой модели и обеспечивать тактильную обратную связь, чтобы дать астронавтам представление о том, как будет чувствовать и вести себя лунная пыль в лунных условиях, гравитационное притяжение которых составляет шестую часть от земного».
Такое моделирование также поможет управлять лунными роботами дистанционно с Земли, избегая проблемы задержки сигнала.
Использование виртуальной модели реголита также может снизить барьеры для тех, кто хочет разработать лунных роботов. Вместо того чтобы инвестировать в дорогостоящие симуляторы (искусственная пыль с теми же свойствами, что и реголит) или иметь доступ к оборудованию, люди, разрабатывающие лунных роботов, могут использовать симуляцию для проведения первоначальных испытаний своих систем.
Теперь команда будет изучать, как люди реагируют на эту систему при управлении роботом с задержкой в несколько секунд. Технически эффективные системы с операторами-людьми все еще должны преодолевать нетехнические барьеры, например, доверять ли человеку, что система будет работать.
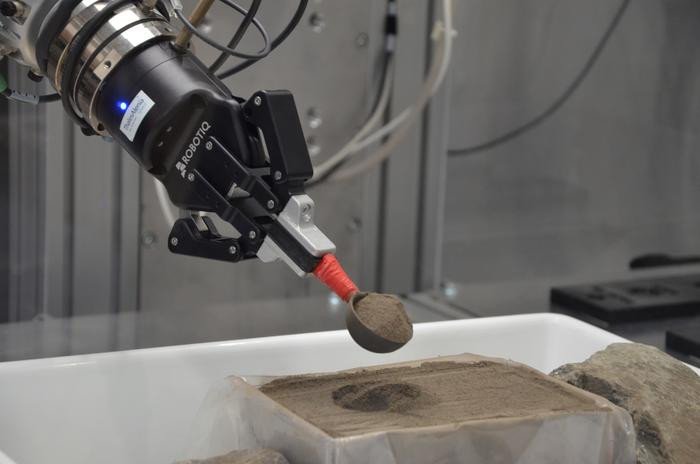
Джо добавил: «Модель предсказала результат задачи по зачерпыванию реголита с достаточной точностью, чтобы считать ее эффективной и заслуживающей доверия в 100 % и 92,5 % случаев. В ближайшее десятилетие мы ждем несколько полетов на Луну с экипажем и без него, например, программу НАСА Artemis и китайскую программу Chang’e. Эта модель может стать ценным инструментом для подготовки или работы этих миссий».
[Фото: Joe Louca / University of Bristol]