До 2024 года мягко сесть на Луну получалось у аппаратов только четырех стран: России, США, Китая и Индии. При этом последние попытки такого рода у «Роскосмоса», американской частной компании Astrobotic, а также частных израильских и японских игроков закончились крушениями. Японское космическое агентство стало пятым в списке тех, кто смог это сделать, показав нетривиально высокий уровень компетентности.

Smart Lander for Investigating Moon («Умный посадочный аппарат для изучения Луны», SLIM) изначально планировали запустить в 2021 году, но на практике это удалось лишь 6 сентября 2023-го. В отличие от многих других аппаратов для посадки на Луну, он использовал времязатратные траектории, поэтому достиг окололунной орбиты только 25 декабря. С 17 января 2024 года аппарат начал постепенно тормозиться, понижая высоту полета над Селеной. К 19-му числу нижняя точка этой орбиты достигла 15 километров, после чего SLIM начал посадку на земной спутник. В 18.20 по Москве он мягко прилунился.
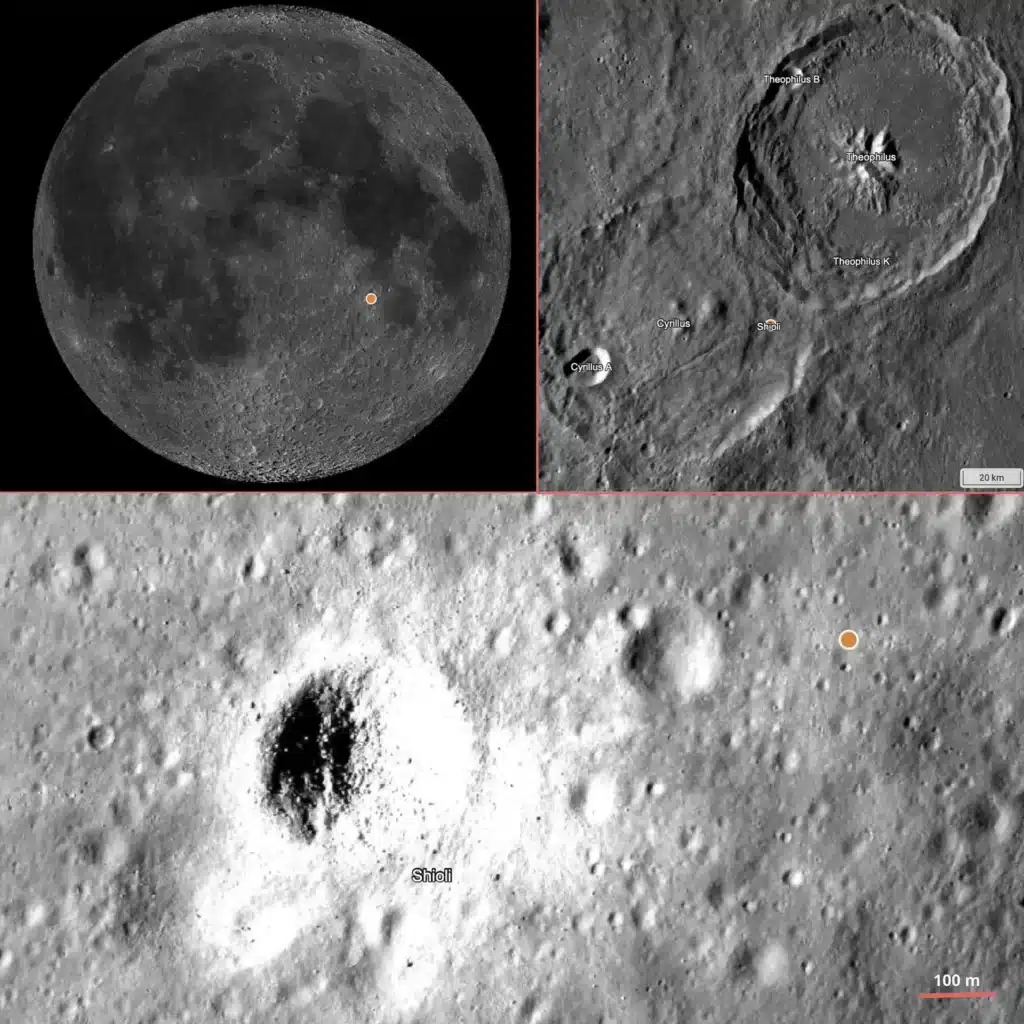
Место посадки аппарата — 13-й градус южной широты видимой стороны Луны, близ небольшого, 300-метрового, кратера Сиори, находящегося внутри более крупного кратера Кирилл. Это резко отличает миссию от прошлогодней индийской, севшей в южных приполярных широтах Луны, чтобы лучше изучить район, где грунт потенциально богат водой.

Выбор Сиори обусловлен тем, что японская миссия специально подбирала место, где можно безопасно сесть только при исключительно высокой точности посадки. Дело в том, что разработчики SLIM считают возможный размер «посадочного пятна» для своего аппарата равным 100 метрам. Для сравнения: посадка последнего из лунных пилотируемых модулей миссий «Аполлонов» шла в посадочный эллипс 15 на пять километров. При посадке отклонение от предполагаемой точки прилунения составило 400 метров — даже несмотря на существенный опыт, накопленный Соединенными Штатами Америки к тому моменту.
До сих пор самую высокоточную посадку на Луне продемонстрировали китайцы: у них посадочное пятно было шесть на шесть километров. И они смогли отклониться от его центра лишь на 89 метров. У «Чандраян-3», севшего в прошлом году, посадочное пятно было четыре на 2,5 километра, но при посадке отклонение составило уже 350 метров от центральной точки.
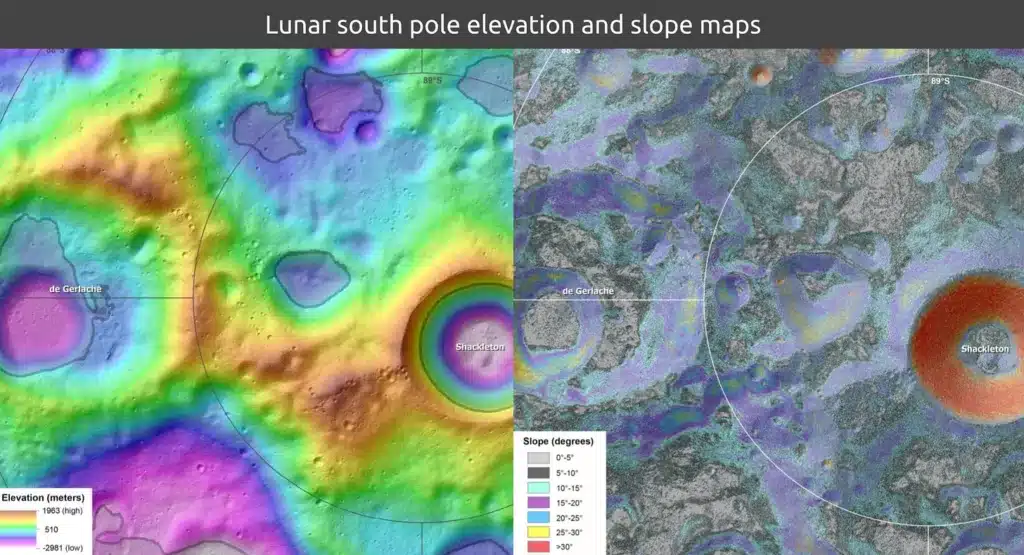
Точности посадочного пятна в 100 метров японский аппарат должен достичь не ради престижа, а потому, что будущие миссии на Луну планируются в район южного полюса, где множество очень сложных ландшафтов. Громадные валуны, склоны и тому подобное означают, что небольшая ошибка с точностью места посадки может стать фатальной для миссии. Даже прилунение аппарата на склон кратера Шеклтон — в силу крутизны его склонов, превышающих 30 градусов — может привести к заваливанию на бок, после чего нормальная работа (и выживание) уже не получится.
Чтобы отработать посадку в столь сложных условиях, японцы выбрали для посадки SLIM местность с наклоном до 15 градусов (склон кратера). Это весьма рискованно для аппарата с «сухой» массой в 120 килограммов. Кроме точности, она требует довольно специфических посадочных ног: они спроектированы преднамеренно разрушающимися при посадке, причем деформация этих алюминиевых опор должна погасить часть энергии удара.
Кроме того, аппарат использует уникальную методику посадки, своего рода заваливание набок при прилунении. Без нее ему было бы сложно обеспечить правильную ориентацию солнечных батарей по Солнцу в условиях посадки на сильно наклонную поверхность.
Для обеспечения высокой точности аппарат будет уточнять свое конкретное положение во время посадки с помощью камер высокого разрешения. Сравнивая данные от них с картами лунной поверхности в своей памяти, он вносит коррективы в работу посадочных двигателей в реальном времени. Такая задача была крайне сложной, поскольку требуемая для этого производительность бортового компьютера очень высока, а слишком производительный компьютер потребляет слишком много энергии.
Среди полезной нагрузки аппарата — не только приборы для анализа состава лунного грунта в районе посадки, но и сразу два лунохода. Причем первый из них, Lunar Excursion Vehicle 1, уникальной конструкции. Его точнее было бы назвать «лунопрыгом», поскольку он должен перемещаться по поверхности спутника прыжками. Это чрезвычайно полезная технология, поскольку, как Naked Science уже писал, стандартные планетоходы обладают исключительно низкой проходимостью. Причем эту проблему практически невозможно решить на колесных и даже гусеничных машинах (реголит Луны и даже Марса имеет слишком специфические свойств).

Между тем значимые научные результаты часто требуют попадания в максимально пересеченную местность — например, на крутые склоны кратеров, куда не достают солнечные лучи и где сохранилось больше легких элементов (вплоть до вечномерзлотных грунтов). Для попадания в открытые части огромных лунных пещер (лавовых трубок) колесно-гусеничные машины в принципе не годятся, а вот «лунопрыги», в силу низкой местной гравитации, потенциально пригодны. Разумеется, первый лунопрыг будет иметь ограниченную приборную нагрузку и энергетические возможности — от него требуется лишь продемонстрировать устойчивое передвижение по склонам.
Второй бортовой луноход, Lunar Excursion Vehicle 2, в каком-то смысле еще экзотичнее. Его масса — 250 граммов, по исходной форме он шар диаметром в восемь сантиметров. За счет подвижных частей луноход способен менять форму и передвигаться по реголиту до двух часов (потом кончится заряд батареи). Разработчиком этого довольно необычного изделия стал японский производитель детских игрушек.
Upd.: судя по предварительным данным, несмотря на мягкую посадку, аппарат вряд ли ждет долгая и продуктивная работа. Из-за слишком сложной схемы прилунения (с запланированным заваливанием набок, чтобы не упасть на склоне), SLIM либо перевернулся, либо встал под незапланированном большим углом к поверхности. Из-за этого солнечные батареи не удался сориентировать на Солнце под нужным углом. А без этого аппарат скоро потеряет нужный уровень зарядки аккумулятора и выйдет из строя. Пока он продолжает вести передачу, которую принимают на Земле, но надолго его батареи в таком положении не хватит. Как минимум первый луноход удалось развернуть, но неясно, сможет ли он передавать данные заметное время (его собственная система связи слишком маломощная, чтобы эффективно доставать до Земли без посредничества базового модуля SLIM).