В рамках программы Innovative Advanced Concepts (NIAC), направленной на разработку футуристических технологических проектов, НАСА планирует построить на поверхности Луны транспортную сеть, состоящую из диамагнитно левитирующих роботов. Полностью автономная и простая в развертывании система будет способна перевозить до 100 тонн полезного груза в день со скоростью 1,61 км/ч. Сеть, которая должна быть развернута к 2030 году, может стать ключевой инфраструктурой для будущей постоянной лунной базы НАСА.
Программа НАСА NIAC направлена на разработку передовых и инновационных концепций, которые иногда кажутся чем-то из области научной фантастики. Цель программы — изучить футуристические технологические концепции, которые радикально отличаются от традиционных подходов. В число 6 отобранных и находящихся в стадии разработки проектов входят телескопы на основе жидкости и ракеты с плазменным двигателем.
Проект транспортной сети «Гибкая левитация на рельсах» (FLOAT), впервые предложенный к реализации в 2021 году, представляет собой систему, использующую магнитную левитацию. Она предназначена для транспортировки полезных грузов по будущей лунной базе НАСА. «Прочная и долговечная роботизированная транспортная система будет необходима для повседневной работы устойчивой лунной базы в 2030-х годах«, — написал в блоге НАСА один из руководителей проекта, Итан Шалер, инженер по робототехнике из Лаборатории реактивного движения.
Транспортная сеть, которую раскатывают как ковер
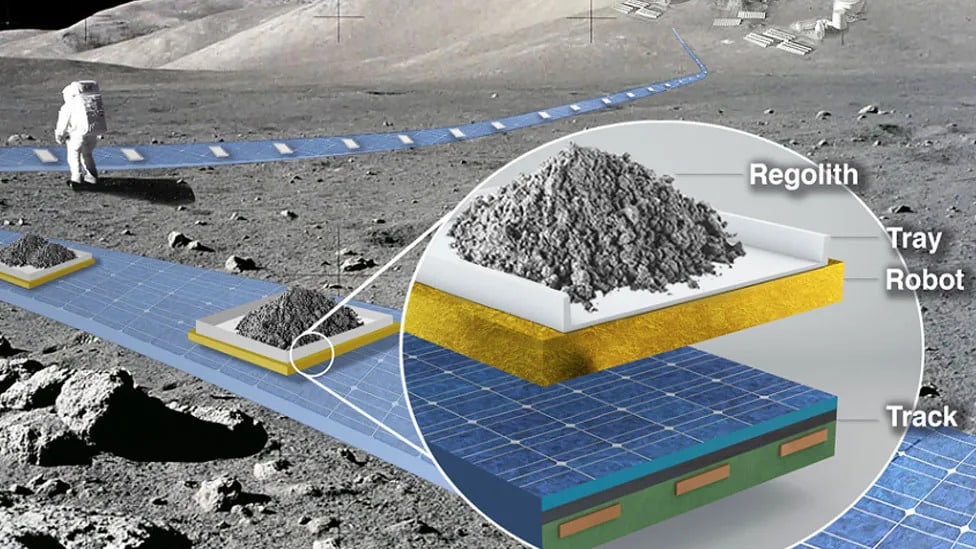
Система FLOAT состоит из автономных намагниченных роботизированных платформ, которые левитируют над сетью дорожек, состоящих из гибкой трехслойной пленки. Первый слой, основанный на графите, позволяет платформам пассивно плавать за счет диамагнитной левитации. Второй включает в себя схему, генерирующую электромагнитную тягу для контролируемого перемещения роботов по дорожке. Дополнительный третий слой включает в себя тонкопленочные солнечные панели для выработки дополнительной энергии для всей лунной базы.
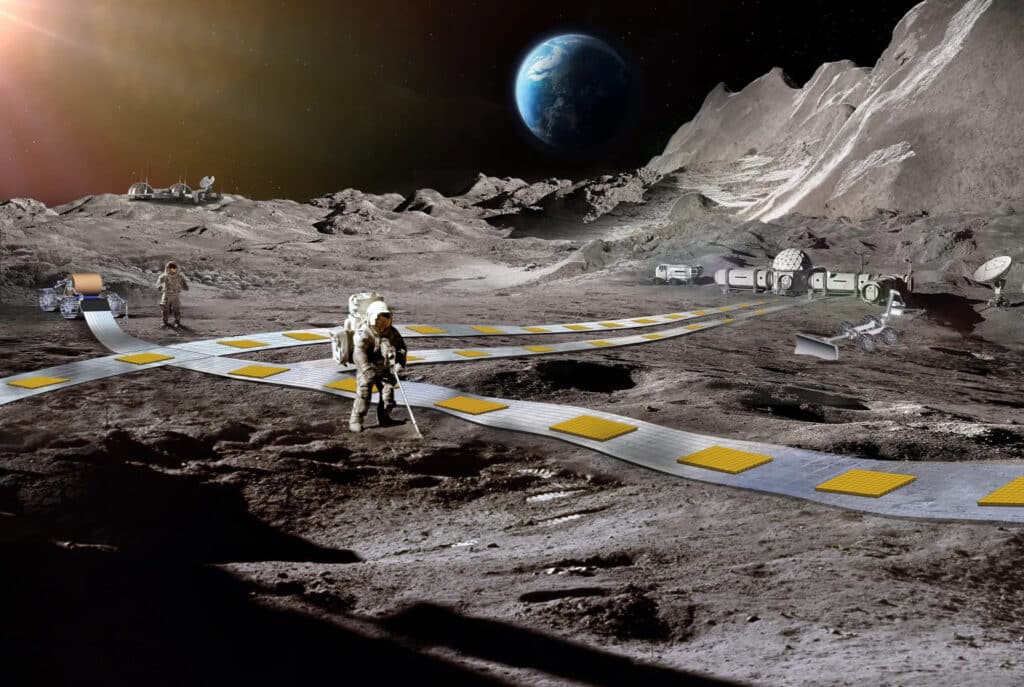
В отличие от наземных автомобильных и железных дорог, пути системы FLOAT не требуют земляных работ — они проложены прямо по лунному реголиту, как ковер. Это не только значительно упрощает установку, но и позволяет не повреждать лунный грунт. Кроме того, у роботов не будет движущихся частей, что в сочетании с левитацией минимизирует абразивный износ, вызванный лунной пылью, в отличие от луноходов с колесами или гусеницами.
Кроме того, «сеть путей может со временем расширяться и реконфигурироваться в соответствии с меняющимися требованиями миссий на лунных базах«, — говорит Шалер. Отдельные роботы будут перевозить полезные грузы различной формы, размера и веса — до 100 тонн. Точнее, роботы будут увенчаны съемными тележками, внутри которых будут размещаться грузы.
Несмотря на то, что роботы не могут использоваться для высокоскоростного транспорта и передвигаются со скоростью всего 1,61 км/ч, система может стать ключевой лунной инфраструктурой. В частности, она может обеспечить долгосрочную поддержку запланированной НАСА постоянной лунной базы. После создания эта база станет плацдармом для будущих исследовательских миссий на Марс в рамках проекта «От Луны до Марса».
После завершения начального этапа разработки инженеры планируют протестировать серию малогабаритных прототипов и различные стратегии подготовки будущего места установки. Воздействие окружающей среды (перепады температур, воздействие радиации, загрязнение реголита и т.д.) также будет оцениваться с помощью моделирования. «Мы также будем использовать эти маломасштабные прототипы для изучения возможностей последующих демонстраций в суборбитальных или лунных полетах (с помощью посадочных аппаратов LSII / CLPS)«, — заключает Шалер.