Японская компания ispace готова к лунной посадке своего посадочного аппарата Hakuro R M1, который отправился на Луну 11 декабря 2022 года. Уже несколько месяцев аппарат находится на круговой орбите и готов к последнему маневру посадки на Луну, запланированному на 18:40 по московскому времени 25 апреля. Вся последовательность действий продлится один час, и в 18:40 должна произойти посадка на Луну. Это будет первый контролируемый спуск частного посадочного аппарата на небесное тело, когда-либо предпринятый на сегодняшний день.
Посадка Hakuto-R M1 представляет собой девятый пункт из 10 запланированных, который характеризует всю миссию, и, очевидно, самый сложный. До сих пор компании ispace удавалось поддерживать контакт с посадочным аппаратом в глубоком космосе и командовать несколькими маневрами по управлению орбитой. Эти этапы представляют собой пункты с третьего по восьмой в миссии ispace, которая завершится посадкой ровера на поверхность Луны.
Посадка на Луну планируется в районе кратера Атлас в районе Моря Холода в Северном полушарии Луны. Если возникнут какие-либо проблемы, ispace сможет прервать манёвр только до 18:40, то есть до начала лунной посадки. Существуют запасные варианты на случай отмены: лунная посадка может быть перенесена на 26 апреля, 1 мая или 3 мая. Если и эти попытки окажутся неудачными, придется ждать 28 дней.
Оперативная миссия Hakuto-R M1 продлится около 12 дней, поскольку ожидается, что он не переживет лунную ночь. Его батареи замерзнут, и через 14 дней, когда вернется солнечный свет, луноход будет уже недоступен для команд, посылаемых с Земли. Одной из основных задач этого аппарата, помимо демонстрации технологии и способности ispace к лунной посадке, будет развертывание ровера Rashid из ОАЭ, находящегося в составе Hakuto R M1. Пока не названа дата, когда произойдет высадка, но ispace заявила, что это не займет много дней.
Манёвр посадки на Луну начнется за час до контакта с поверхностью, на почти круговой орбите на высоте 100 км. Здесь посадочный аппарат включит свою главную двигательную установку, состоящую из двигателя с тягой 400 Н и шести двигателей с тягой по 200 Н. Это включение продлится несколько десятков секунд и уменьшит высоту посадочного аппарата, выведя его на орбиту с перигелием на высоте 25 км.
В течение сорока минут аппарат будет двигаться по эллиптической орбите, пока не достигнет перигелия. Здесь он снова включит свою основную систему, все больше и больше уменьшая горизонтальную скорость. Hakuto R M1 будет находиться полностью вертикально к поверхности на высоте 2 км.
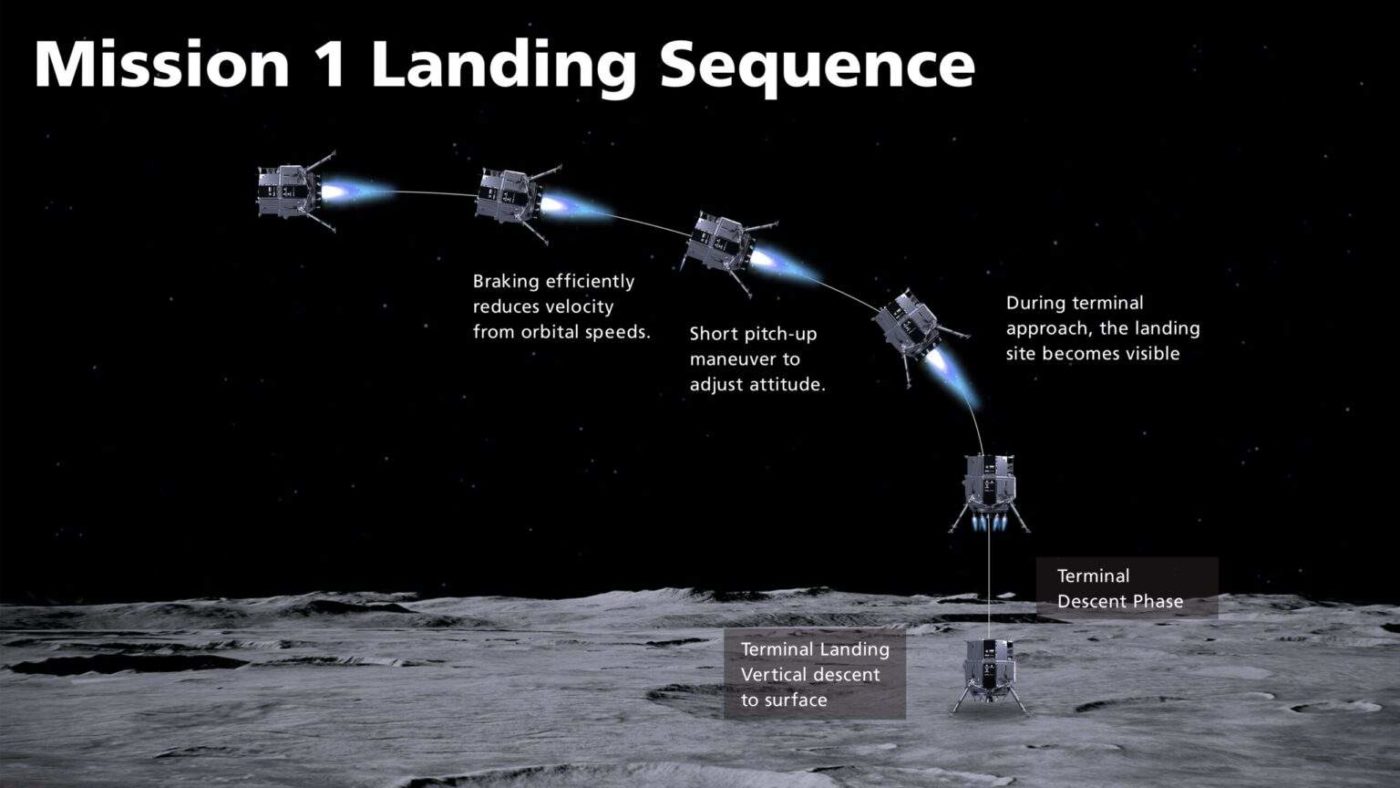
Как только он примет вертикальное положение, двигатель 400 Н будет выключен, а двигатели 200 Н, расположенные по кругу вокруг центрального двигателя, останутся включенными. Это будет сделано для того, чтобы предотвратить слишком большую тягу и «отскакивание» от поверхности. Чтобы завершить посадку на Луну, спускаемый аппарат должен удариться о поверхность со скоростью несколько м/с, поглощаемой посадочными опорами.
Весь этот манёвр будет выполняться автоматически, без поддержки системы распознавания поверхности. Точность спуска составит несколько километров, но в выбранном районе нет серьезных препятствий, и он абсолютно ровный на всей запланированной площади посадки.
Несмотря на отсутствие системы распознавания поверхности в реальном времени, которой оснащены, например, марсоходы НАСА, во время спуска аппарат ispace будет делать фотографии, которые будут возвращены на Землю, как только будет установлена связь.