Инженеры из НАСА разработали проект новых марсоходов: четырёхлапых роботов на основе робособак Spot, которые смогут взаимодействовать группами.

В будущем марсоходами могут стать четвероногие «робопсы», превосходящие колесные по скорости и маневренности. Датчики и нейросети помогут им ориентироваться, избегать препятствий, создавать трехмерные карты местности и выбирать маршруты движения. презентацияНа недавней, прошедшей онлайн, встрече Американского геофизического общества (AGU) был представлен проект Au-Spot.
Участники выступления подчеркнули: использование обычных колесных аппаратов ограничено территориями с равной поверхностью. Множество интересных для исследования ученых зон Марса слишком опасны для них, но доступны шагающим машинам, разрабатываемым на базе серийных роботов. SpotКомпании Boston Dynamics особенно перспективны машины для обследования скрытых под поверхностью тоннелей и пещер. В будущем такие машины могут предоставить укрытие для обитаемой базы, однако пока заглянуть туда нечем и некому. Возможно, в этих местах сохранились следы жизни, если она все-таки есть или была на Красной планете.
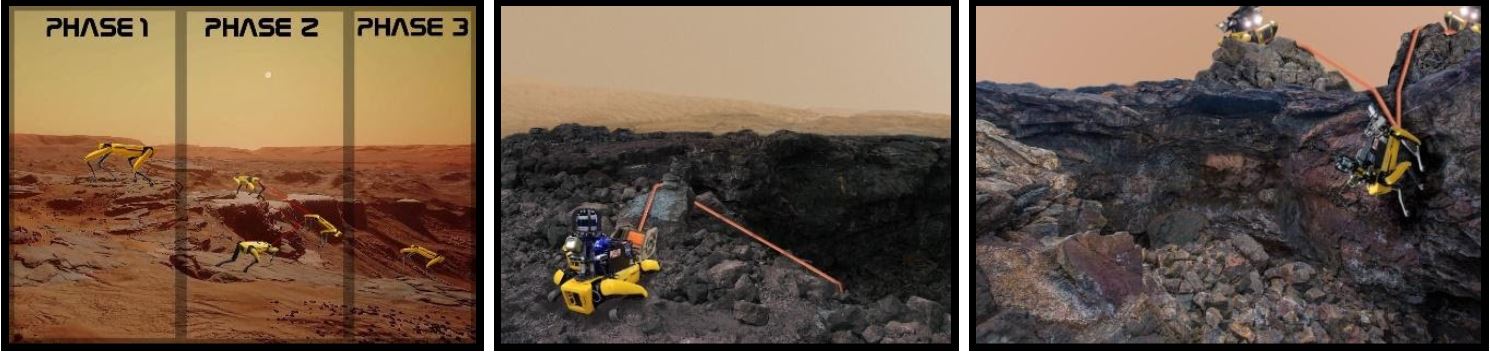
«Даже падение не испортит миссию,— отметили докладчики.— Робот сможет подняться из любой ситуации благодаря своим алгоритмам». По расчетам создателей, четвероногий марсоход будет в 12 раз легче Perseverance и сможет развивать скорость до пяти километров в час: к сведению, Curiosity набирает лишь около 0,14 километра в час. Планируется, что Au-Spot будут работать командой, поддерживая и страховая друг друга. Группа может состоять из трех машин: основной, способной погружаться в пещеры, и пары «вспомогательных», оснащенных тросами, которые помогут ей в сложных участках и обеспечат связь при работе на глубине.
Более 60 ученых и инженеров работают над проектом.
Задачи проекта: модификация серийного Spot, создание необходимых сенсоров и алгоритмов управления. Au-Spot будет ориентироваться с помощью бортовых видеокамер, лидара и датчиков движения. Робот проходит испытания на искусственной полосе препятствий и в естественных ландшафтах, имитирующих пещеры и пустыни Марса.